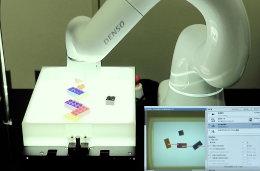
デンソーロボットとカメラを活用した設備の立上げを支援するロボットビジョンアプリケーションソフトウェアのパッケージです。
EVP2は、「ピック&プレース」に特化したプログラムレスの画像処理アプリケーションです。
既存アプリケーションEVPの簡単な操作性はそのままに、機能の拡充・数倍の処理能力向上を実現しました。
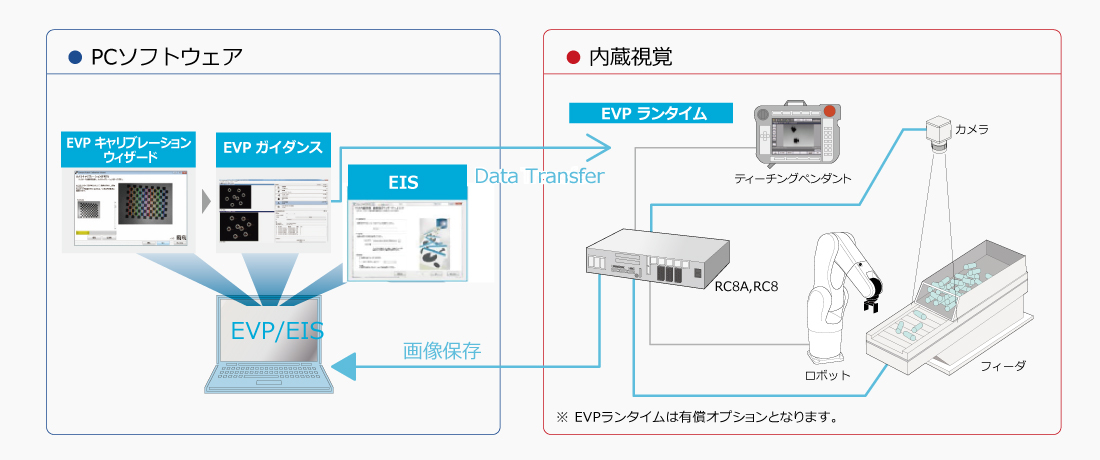
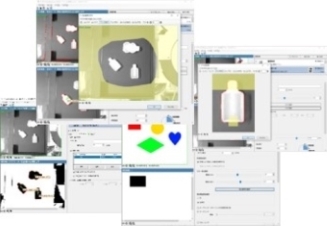
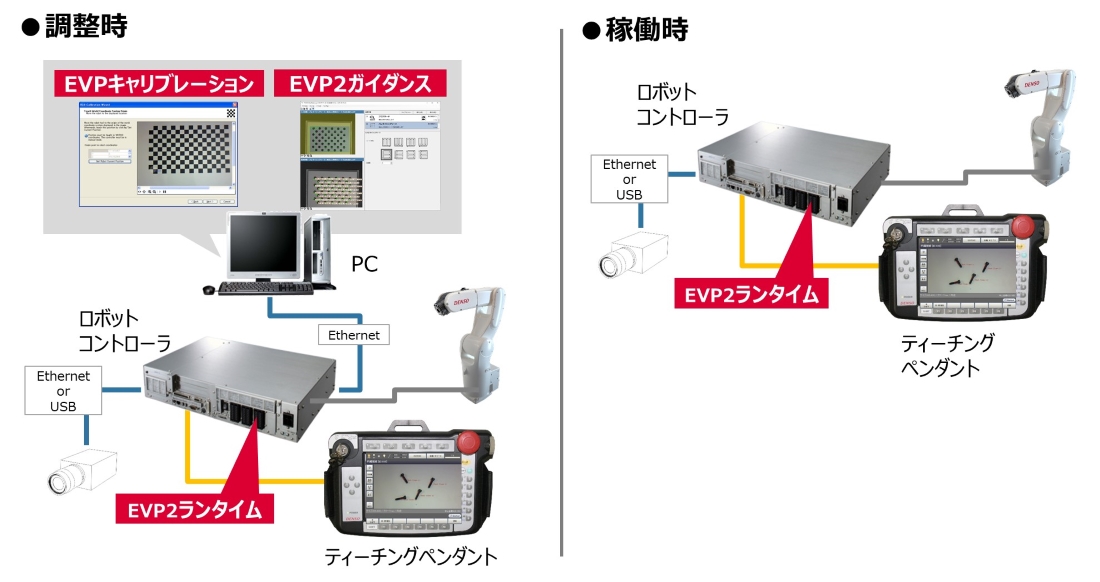
画像処理の設定は、パソコン上のアプリケーション(EVP2ガイダンス)で行います。
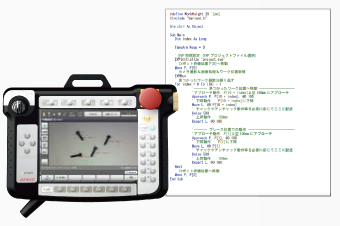
実行時(EVP2ランタイム)は、ロボットコントローラと接続したカメラのみで稼働させることができます。
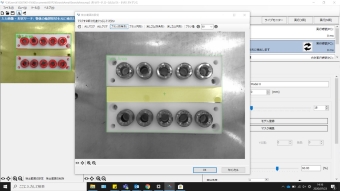
●カメラのキャリブレーションはチェスボードを読み込ませるだけで完了。
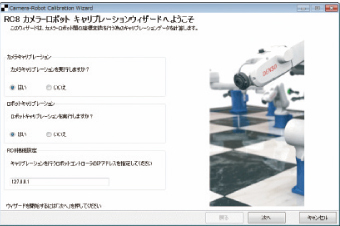
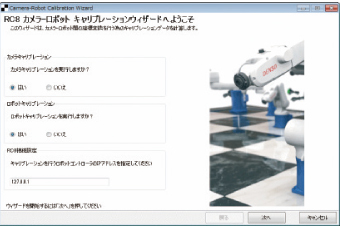
●ロボットとカメラのキャリブレーションはウィザードに従って進むだけで完了。
●EVPに比べ大幅に機能拡充・追加、処理能力の向上を実現。
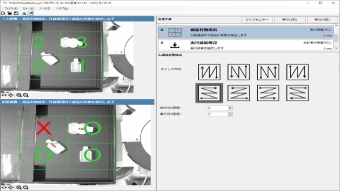
●画像処理フローを、プログラムレスの簡単な操作で設定可能。
豊富なサーチ機能
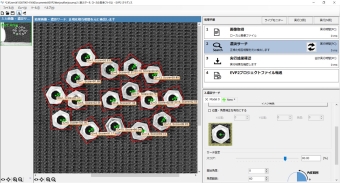
・形状サーチ
・濃淡サーチ
・ブロブサーチ
・カラーサーチ
・多段階サーチ
便利な機能
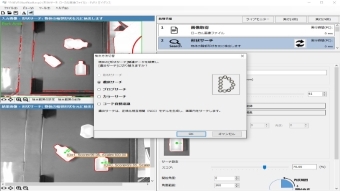
・モデルマスク
・サーチ領域の編集
・検出方法切り替え
※有償オプション
●ロボットコントローラ内蔵視覚で画像処理を実行するため低価格を実現。
(ロボットコントローラーに内蔵)
シンプルな構成
・パソコン不要
・視覚コントローラ不要
・画像処理結果をロボットに送る通信
プログラム不要
・選択できるカメラの種類が豊富
●画像処理ライブラリを大幅に刷新し、
認識速度を格段に向上(既存EVPと比較)
・濃淡サーチ 数倍~数十倍向上
・形状検出 数倍~数十倍向上
・ブロブ検出 数倍~数十倍向上
※有償オプション
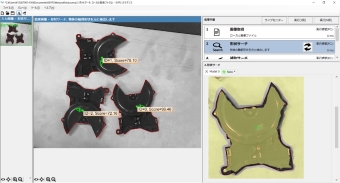
対象物の形状モデルを登録し、同じ形状の対象物の位置角度を検出できる機能。
対象物の輝度分布をモデルとして登録し、同じ輝度分布の対象物の位置角度を正規化相関探索で検出できる機能。
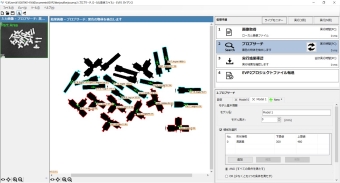
二値化した画像から対象物の面積・周囲長などの特徴量で対象物を絞り込み、位置角度を検出できる機能。
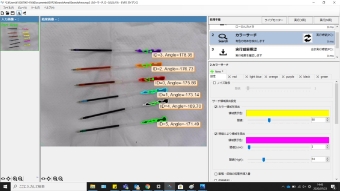
画像の色情報と対象物の面積・周囲長などの特徴量から対象物を絞り込み、位置角度を検出できる機能。
プロジェクトを新規作成せずに、検出方法切替ボタンで検出方法を変更することができる機能。
形状サーチ・濃淡サーチにてモデルを登録後、検出に含めたくない領域を塗りつぶすことができる機能。
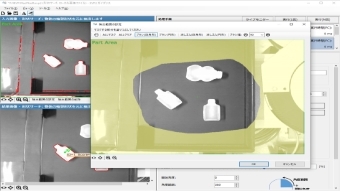
サーチ領域を自由に編集することができる機能。塗りつぶされた領域はサーチ領域から外すことができる。
サーチステップで検出したワークに対して、さらに新しい検出アルゴリズムを使って検出することで、検出正解率を向上させる機能。
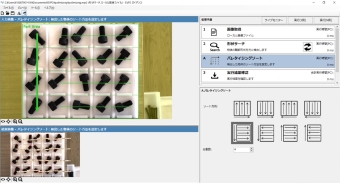
検出したワークを特定のルールでソートする機能。ソート方向・分割数をもとにワークのソート順番を決めることができる。
検出したワークが特定領域の中にあるか判定するための機能です。チェック方向、縦方向分割数、横方向分割数で領域を決めることができる。

検出したワークを把持する際に、エンドエフェクタが隣のワークに衝突するのを回避する機能。

フィーダの位置をエリア分割して設定することで各エリアの部品分布状態の判断が可能となり、フィーダを適切に制御することができる。
【OS】 Windows® 10 / 11
【PC】 CPU マルチコアプロセッサ2GHz、メモリ 4GB、HDD 4GB以上
【ロボットコントローラ】RC9 Ver.1.0.*以降
RC8A Ver.2.11.1以降
RC8□-□□□□ー□□E□ー□□ー□□□
RC8□-□□□□ー□□C□ー□□ー□□□
(ロボットコントローラ型式については、DENSO ROBOT USER MANUALSの「コントローラ型式」(ID:1314)
を参照してください。)
COBOTTA Ver.2.11.1以降
【推奨カメラ】 Basler製 GigEカメラ aceシリーズ
iDS製 uEyeカメラ SEシリーズ
Canon製 ネットワークカメラ WebView Livescopeシリーズ
Canon製ネットワークカメラ N10-W02
120万画素(1280×960)以下を推奨
※Windowsは、Microsoft Corporationの米国およびその他の国における商標または登録商標です。
●カメラのキャリブレーションはチェスボードを読み込ませるだけで完了。
●ロボットとカメラのキャリブレーションはウィザードに従って 進むだけで完了。
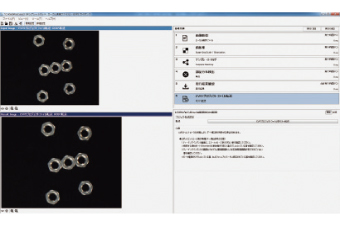
●画像処理フローを、プログラム レスの簡単な操作で設定可能。
●複数のモデルが登録できるので、品種が混在していても認識可能。
●実行時、ティーチングペンダントに結果を表示できるので、パソコンは不要。
●画像処理結果をロボットのポジション型変数(P型)に出力するため、画像処理と通信のプログラムは不要。
iDS製 uEyeカメラ SEシリーズ
Canon製 ネットワークカメラ WebView Livescopeシリーズ
Canon製ネットワークカメラ N10-W02
120万画素(1280×960)以下を推奨
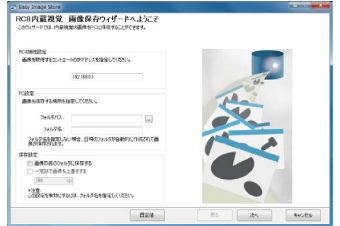
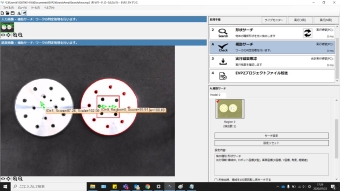
ウィザード形式でロボットコントローラとPC間の接続や画像保存先を簡単に設定することができます。
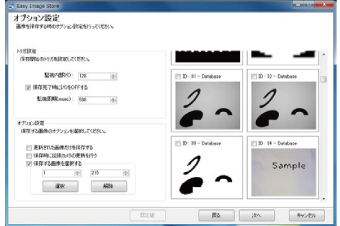
ロボットコントローラの内部I/O番号と、監視周期をトリガとして設定することで、任意のタイミングで画像保存が可能です。