コンパクトなボディに抜群のパワーとスピードを備えています。
最大リーチ|505・605mm
最大可搬質量|4kg
標準サイクルタイム|0.35秒
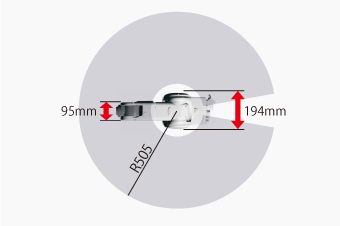
ベース設置面積やアーム各部の幅がコンパクトになっています。これにより、狭いスペース内でも柔軟な可動をすることができます。
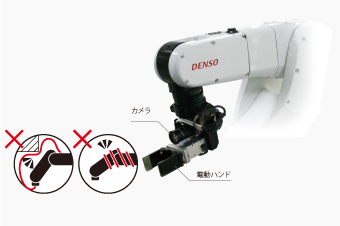
フランジ先端(6軸部)に信号線17芯とEthernetポートを設けるオプションです。これによりケーブルの絡み・断線を気にすることなく、フランジ先端に電動ハンドやカメラを接続することができます。

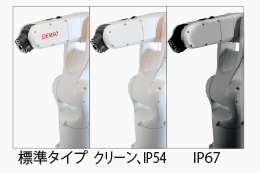
耐悪環境タイプ(IP67)を新たに追加しています。
切削水・粉が多くかかる加工機周辺や水洗いが必要な環境での使用に適したタイプです。





| 項 目 | 単 位 | 仕 様 | ||
|---|---|---|---|---|
| 製品名 | - | VS-050 | VS-060 | |
| 軸数 | - | 6 | ||
| 位置検出方式 | - | アブソリュートエンコーダー | ||
| 駆動モータ/ブレーキ | - | 全軸ACサーボモータ/全軸ブレーキ付 | ||
| アーム全長(第1アーム+第2アーム) | mm | 505(250+255) | 605(305+300) | |
| 最大動作領域(P点) | 505 | 605 | ||
| 動作角度 | J1軸 | ° | ±170(*4) | |
| J2軸 | ±120 | |||
| J3軸 | +151,-120 | +155,-125 | ||
| J4軸 | ±270 | |||
| J5軸 | ±120(*5) | |||
| J6軸 | ±360 | |||
| 最大可搬質量 | kg | 4 | ||
| 最大速度 | J1軸 | deg/s | 510 | |
| J2軸 | 408 | 340 | ||
| J3軸 | 490.09 | 393.04 | ||
| J4軸 | 540 | |||
| J5軸 | 415.5 | |||
| J6軸 | 864 | |||
| 合成最大速度(ツール取付面中心) | mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 標準サイクルタイム(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 位置繰返し精度(ツール取付面中心)(*2) | mm | ±0.02 | ||
| 最大許容慣性モーメント (イナーシャ) |
J4,J5軸 | kgm2 | 0.2 | |
| J6軸 | 0.05 | |||
| 最大許容モーメント | J4,J5軸 | Nm | 6.66 | |
| J6軸 | 3.13 | |||
| 信号線・エア配管電磁弁 (オプション) |
信号線 | - | 10芯(近接センサー等の信号線)(*6)(*7) | |
| エア配管電磁弁(*3) | - | 5系統(φ4×4,φ4×1) 電磁弁(2ポジション、ダブルソレノイド)×2 |
||
| 通信ケーブルフランジ仕様-A(オプション) | - | 17芯(カメラ等の電源線)(*7) | ||
| - | LAN×1(1000BASE-T)(*8) | |||
| エア源 | 常用圧力 | Mpa | 0.20~0.39 | |
| 許容最大圧力 | 0.49 | |||
| 空気伝播騒音(A加重等価持続音圧レベル) | dB | 65以下 | ||
| 保護等級 | - | IP40 | ||
| 質量 | kg | 約27 | 約28 | |
| 項 目 | 単 位 | 仕 様 | ||
|---|---|---|---|---|
| 製品名 | - | VS-050 | VS-060 | |
| 軸数 | - | 6 | ||
| 位置検出方式 | - | アブソリュートエンコーダー | ||
| 駆動モーター/ブレーキ | - | 全軸ACサーボモーター/全軸ブレーキ付 | ||
| アーム全長(第1アーム+第2アーム) | mm | 505(250+255) | 605(305+300) | |
| 最大動作領域(P点) | 505 | 605 | ||
| 動作角度 | J1軸 | ° | ±170(*4) | |
| J2軸 | ±120 | |||
| J3軸 | +151,-120 | +155,-125 | ||
| J4軸 | ±270 | |||
| J5軸 | ±120 | |||
| J6軸 | ±360 | |||
| 最大可搬質量 | kg | 4 | ||
| 最大速度 | J1軸 | deg/s | 510 | |
| J2軸 | 408 | 340 | ||
| J3軸 | 490.09 | 393.04 | ||
| J4軸 | 540 | |||
| J5軸 | 415.5 | |||
| J6軸 | 864 | |||
| 合成最大速度(ツール取付面中心) | mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 標準サイクルタイム(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 位置繰り返し精度(ツール取付面中心)(*2) | mm | ±0.02 | ||
| 最大許容イナーシャ(慣性モーメント) | J4,J5軸 | kgm2 | 0.2 | |
| J6軸 | 0.05 | |||
| 最大許容モーメント | J4,J5軸 | Nm | 6.66 | |
| J6軸 | 3.13 | |||
| 信号線・エア配管電磁弁(オプション) | 信号線 | - | 10芯(近接センサー等の信号線)(*5) | |
| エア配管電磁弁(*3) | - | 5系統(φ4×4,φ4×1) 電磁弁(2ポジション、ダブルソレノイド)×2 |
||
| エアー源 | 常用圧力 | Mpa | 0.20~0.39 | |
| 許容最大圧力 | 0.49 | |||
| 空気伝播騒音(A加重特価持続音圧レベル) | dB | 65以下 | ||
| 保護等級 | - | IP54(手首部IP65) | ||
| 質量 | kg | 約27 | 約28 | |
| 項 目 | 単 位 | 仕 様 | ||
|---|---|---|---|---|
| 製品名 | - | VS-050 | VS-060 | |
| 軸数 | - | 6 | ||
| 位置検出方式 | - | アブソリュートエンコーダー | ||
| 駆動モーター/ブレーキ | - | 全軸ACサーボモーター/全軸ブレーキ付 | ||
| アーム全長(第1アーム+第2アーム) | mm | 505(250+255) | 605(305+300) | |
| 最大動作領域(P点) | 505 | 605 | ||
| 動作角度 | J1軸 | ° | ±170 | |
| J2軸 | ±120 | |||
| J3軸 | +151,-120 | +155,-125 | ||
| J4軸 | ±270 | |||
| J5軸 | ±120 | |||
| J6軸 | ±360 | |||
| 最大可搬質量 | kg | 4 | ||
| 最大速度 | J1軸 | deg/s | 510 | |
| J2軸 | 408 | 340 | ||
| J3軸 | 490.09 | 393.04 | ||
| J4軸 | 540 | |||
| J5軸 | 415.5 | |||
| J6軸 | 864 | |||
| 合成最大速度(ツール取付面中心) | mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 標準サイクルタイム(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 位置繰り返し精度(ツール取付面中心)(*2) | mm | ±0.02 | ||
| 最大許容イナーシャ(慣性モーメント) | J4,J5軸 | kgm2 | 0.2 | |
| J6軸 | 0.05 | |||
| 最大許容モーメント | J4,J5軸 | Nm | 6.66 | |
| J6軸 | 3.13 | |||
| 信号線・エア配管電磁弁(オプション) | 信号線 | - | 10芯(近接センサー等の信号線)(*4) | |
| エア配管電磁弁(*3) | - | 4系統(φ4×4) 電磁弁(2ポジション、ダブルソレノイド)×2 |
||
| エアー源 | 常用圧力 | Mpa | 0.20~0.39 | |
| 許容最大圧力 | 0.49 | |||
| 空気伝播騒音 | dB | 65以下 | ||
| クリーン度(ISO14644-1) | - | ISOクラス3 | ||
| 質量 | kg | 約27 | 約28 | |
| 項 目 | 単 位 | 仕 様 | ||
|---|---|---|---|---|
| 製品名 | - | VS-050 | VS-060 | |
| 軸数 | - | 6 | ||
| 位置検出方式 | - | アブソリュートエンコーダー | ||
| 駆動モーター/ブレーキ | - | 全軸ACサーボモーター/全軸ブレーキ付 | ||
| アーム全長(第1アーム+第2アーム) | mm | 505(250+255) | 605(305+300) | |
| 最大動作領域(P点) | 505 | 605 | ||
| 動作角度 | J1軸 | ° | ±170 | |
| J2軸 | ±120 | |||
| J3軸 | +151,-120 | +155,-125 | ||
| J4軸 | ±270 | |||
| J5軸 | ±120 | |||
| J6軸 | ±360 | |||
| 最大可搬質量 | kg | 4 | ||
| 最大速度 | J1軸 | deg/s | 510 | |
| J2軸 | 408 | 340 | ||
| J3軸 | 490.09 | 393.04 | ||
| J4軸 | 540 | |||
| J5軸 | 415.5 | |||
| J6軸 | 864 | |||
| 合成最大速度(ツール取付面中心) | mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 標準サイクルタイム(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 位置繰り返し精度(ツール取付面中心)(*2) | mm | ±0.02 | ||
| 最大許容イナーシャ(慣性モーメント) | J4,J5軸 | kgm2 | 0.2 | |
| J6軸 | 0.05 | |||
| 最大許容モーメント | J4,J5軸 | Nm | 6.66 | |
| J6軸 | 3.13 | |||
| 信号線・エア配管電磁弁(オプション) | 信号線 | - | 10芯(近接センサー等の信号線)(*4) | |
| エア配管電磁弁(*3) | - | 4系統(φ4×4) 電磁弁(2ポジション、ダブルソレノイド)×2 |
||
| エアー源 | 常用圧力 | Mpa | 0.20~0.39 | |
| 許容最大圧力 | 0.49 | |||
| 空気伝播騒音 | dB | 65以下 | ||
| クリーン度(ISO14644-1) | - | ISOクラス5 | ||
| 質量 | kg | 約27 | 約28 | |
| 項 目 | 単位 | 仕 様 | ||
|---|---|---|---|---|
| 製品名 | - | VS-050 | VS-060 | |
| 軸数 | - | 6 | ||
| 位置検出方式 | - | アブソリュートエンコーダー | ||
| 駆動モーター/ブレーキ | - | 全軸ACサーボモーター/全軸ブレーキ付 | ||
| アーム全長(第1アーム+第2アーム) | mm | 505(250+255) | 605(305+300) | |
| 最大動作領域(P点) | 505 | 605 | ||
| 動作角度 | J1軸 | ° | ±170(*4) | |
| J2軸 | ±120 | |||
| J3軸 | +151,-120 | +155,-125 | ||
| J4軸 | ±270 | |||
| J5軸 | ±120 | |||
| J6軸 | ±360 | |||
| 最大可搬質量 | kg | 4 | ||
| 最大速度 | J1軸 | deg/s | 510 | |
| J2軸 | 408 | 340 | ||
| J3軸 | 490.09 | 393.04 | ||
| J4軸 | 540 | |||
| J5軸 | 415.5 | |||
| J6軸 | 864 | |||
| 合成最大速度(ツール取付面中心) | mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 標準サイクルタイム(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 位置繰り返し精度(ツール取付面中心)(*2) | mm | ±0.02 | ||
| 最大許容イナーシャ(慣性モーメント) | J4,J5軸 | kgm2 | 0.2 | |
| J6軸 | 0.05 | |||
| 最大許容モーメント | J4,J5軸 | Nm | 6.66 | |
| J6軸 | 3.13 | |||
| 信号線・エア配管電磁弁(オプション) | 信号線 | - | 10芯(近接センサー等の信号線)(*5) | |
| エア配管電磁弁(*3) | - | 5系統(φ4×4,φ4×1) 電磁弁(2ポジション、ダブルソレノイド)×2 |
||
| エアー源 | 常用圧力 | Mpa | 0.20~0.39 | |
| 許容最大圧力 | 0.49 | |||
| 空気伝播騒音(A加重等特価持続音圧レベル) | dB | 65以下 | ||
| 保護等級 | - | IP67(*6) | ||
| 質量 | kg | 約27 | 約28 | |
| 分 類 | 品 名 | 数 量 |
|---|---|---|
| ロボット&付属品 | ロボット本体 | 1台 |
| 本体間ケーブル(オプション品) | 1本 | |
| 方向指示ラベル | 1枚 | |
| 位置決めピン(めねじ付位置決めピン&ダイヤピン) | 1セット | |
| J2、J3メカエンド用ストッパボルト | 4本 | |
| コントローラ&付属品 | ロボットコントローラ | 1台 |
| 電源ケーブル(5m) | 1本 | |
| ペンダントレス用ダミーコネクタ | 1個 | |
| ケーブルクランプ | 1個 | |
| ソフトウェア他 | WINCAPSIII Trial インストールディスク | 1枚 |
| 取扱説明書(マニュアルパックディスク) | 1セット | |
| 警告ラベル | 1枚 |
| 分 類 | 品 名 | ||
|---|---|---|---|
| I/Oケーブル | 標準I/O ケーブルセット | Mini I/Oケーブル(8 m)と HAND I/Oケーブル(8 m)のセット |
|
| Mini I/Oケーブル(15 m)と HAND I/Oケーブル(15 m)のセット |
|||
| Mini I/O ケーブル(68ピン) | 8 m | ||
| 15 m | |||
| HAND I/O ケーブル(20ピン) | 8 m | ||
| 15 m | |||
| パラレルI/O用ケーブル(96ピン) | 8 m | ||
| 15m | |||
| 操作用機器 | 多機能ティーチングペンダント | ケーブル長:4 m | |
| ケーブル長:8 m | |||
| ケーブル長:12 m | |||
| ミニペンダントキット (WINCAPSIII Lightを含む) |
ケーブル長:4 m | 日本語表記 | |
| 英語表記 | |||
| ケーブル長:8 m | 日本語表記 | ||
| 英語表記 | |||
| ケーブル長:12 m | 日本語表記 | ||
| 英語表記 | |||
| ペンダント延長ケーブル | 4 m | TP, MP用 | |
| 8 m | TP, MP用 | ||
| ロボット本体オプション | 外付けバッテリユニット | ケーブル長: 4 m | |
| ケーブル長: 8 m | |||
| ケーブル長: 12 m | |||
| ブレーキ解除ユニット | ケーブル長: 4 m | ||
| ケーブル長: 8 m | |||
| ケーブル長: 12 m | |||
| エアパージユニット | - | ||
| セカンドアームカバーR | - | ||
| 品 名 / 仕 様 | |||
|---|---|---|---|
| UL仕様以外 | VS用本体間ケーブル(RC8シリーズ) | ストレート | 2 m |
| 4 m | |||
| 6 m | |||
| 12 m | |||
| 20 m | |||
| アングル | 2 m | ||
| 4 m | |||
| 6 m | |||
| 12 m | |||
| 20 m | |||
| UL仕様 (RC7M用ケーブルを使用) |
VS用本体間ケーブル(RC7M) | ストレート | 2 m |
| 4 m | |||
| 6 m | |||
| 12 m | |||
| アングル | 2 m | ||
| 4 m | |||
| 6 m | |||
| 12 m | |||
| 分 類 | 品 名 | ||
|---|---|---|---|
| RC8用増設ボード | パラレルI/Oボード (PCIスロット) |
NPNタイプI/O | コントローラに組付出荷 (ライセンス有) |
| ボード単品出荷(補給用) (ライセンス有) |
|||
| ボード単品出荷(補給用) (ライセンス無) |
|||
| ライセンス証のみ | |||
| PNPタイプI/O | コントローラに組付出荷 (ライセンス有) |
||
| ボード単品出荷(補給用) (ライセンス有) |
|||
| ボード単品出荷(補給用) (ライセンス無) |
|||
| ライセンス証のみ | |||
| DeviceNeスレーブ ボード (PCIeスロット) |
子局 | コントローラに組付出荷 (ライセンス有) |
|
| ボード単品出荷(補給用) (ライセンス有) |
|||
| ボード単品出荷(補給用) (ライセンス無) |
|||
| ライセンス証のみ | |||
| CC-Linkリモートデバイスボード (PCIeスロット) |
コントローラに組付出荷(ライセンス有) | ||
| ボード単品出荷(補給用)(ライセンス有) | |||
| ボード単品出荷(補給用)(ライセンス無) | |||
| ライセンス証のみ | |||
| PROFIBUSスレーブボード (PCIeスロット) |
コントローラに組付出荷(ライセンス有) | ||
| ボード単品出荷(補給用)(ライセンス有) | |||
| ボード単品出荷(補給用)(ライセンス無) | |||
| ライセンス証のみ | |||
| EtherNet I/Pアダプタボード (PCIeスロット) |
コントローラに組付出荷(ライセンス有) | ||
| ボード単品出荷(補給用) | |||
| ボード単品出荷(補給用)(ライセンス無) | |||
| ライセンス証のみ | |||
| 電動ハンドコントロールボード (PCIスロット) |
コントローラに組付出荷(ライセンス有) | ||
| ボード単品出荷(補給用)(ライセンス有) | |||
| ボード単品出荷(補給用)(ライセンス無) | |||
| ライセンス証のみ | |||
| RC8用 VGAオプション |
VGA中継ケーブルセット※1 | VGA中継ケーブルおよびコントローラに VGAコネクタを装着して出荷 |
|
| 設置用オプション | 壁掛用ステーセット | 壁掛、床置用 | |