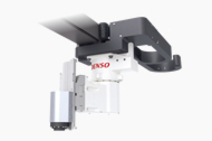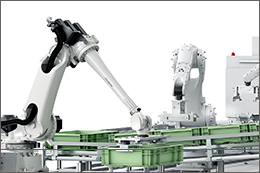
덴소 로봇과 카메라를 활용한 설비 가동을 지원하는 로봇 비전 애플리케이션 소프트웨어 패키지입니다.
기존 애플리케이션 EVP의 간단한 조작성은 그대로 유지하면서 기능 확충ㆍ몇 배의 처리 능력 향상을 실현했습니다.
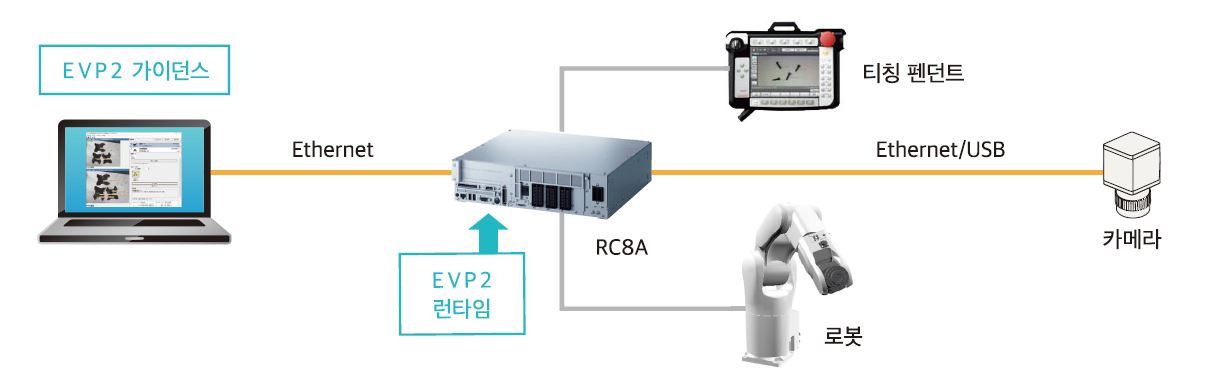
이미지 처리 설정은 PC의 애플리케이션(EVP2 가이던스)에서 합니다.
실행 시(EVP2 런타임)에는 로봇 컨트롤러와 연결된 카메라만으로 가동시킬 수 있습니다.
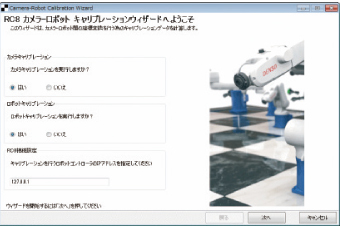
·카메라 캘리브레이션은 체스 보드를 읽기만하면 완료.
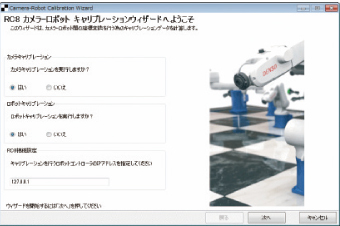
·로봇과 카메라의 캘리브레이션은 위저드에 따라 진행하기만 하면 완료.
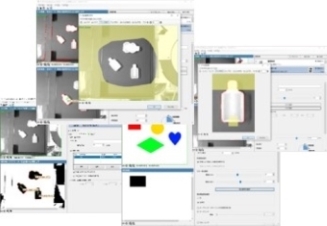
・이미지 처리 흐름을 프로그래밍 없이 간단한 조작으로 설정 가능
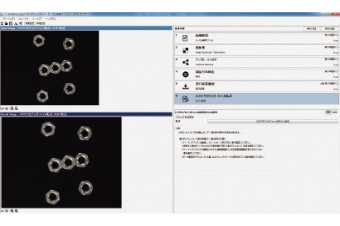
・풍부한 검색 기능
형상 검색
명암 검색
비정형 형상 검색
컬러 검색
보조 검색
・편리한 기능
모델 마스크
검색 영역 편집
검출 방법 전환
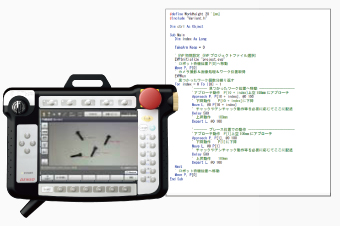
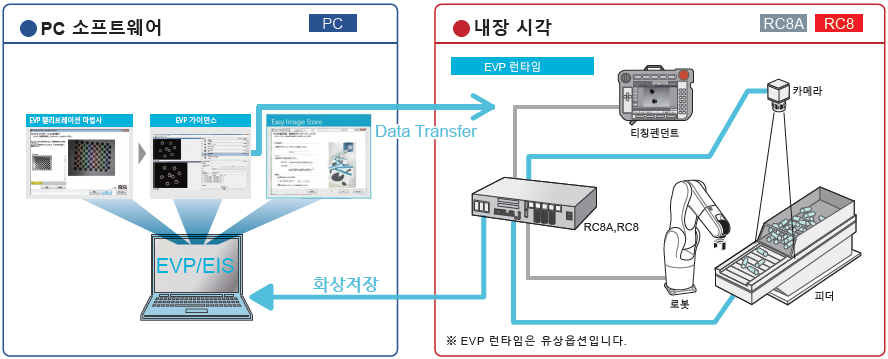
・로봇 컨트롤러 내장 시각으로 이미지 처리를 실행하기 위해 낮은 가격을 실현
・심플한 구성
PC 불필요
시각 컨트롤러 불필요
이미지 처리 결과를 로봇으로 보내는 통신 프로그램 불필요
선택할 수 있는 카메라 종류가 풍부
・이미지 처리 라이브러리를 대폭 쇄신하여 인식 속도를 현격히 향상(EVP와 비교)
명암 검색
형상 검출 약
비정형 형상 검출
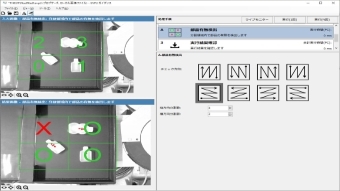
검출한 워크가 특정 영역 안에 있는지 판정하는 기능입니다.
체크 방향, 세로 방향 분할 수, 가로 방향 분할 수로 영역을 정할 수 있습니다.
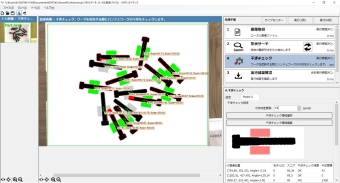
검출한 워크를 파지할 때 엔드 이펙터가 옆 워크에 충돌하는 것을 회피하는 기능입니다.

부품 분포 검출 스텝에서 피더의 위치를 영역 분할하여 설정하면 각 영역의 부품 분포 상태의 판단이 가능해져 피더를 적절하게 제어할 수 있습니다.
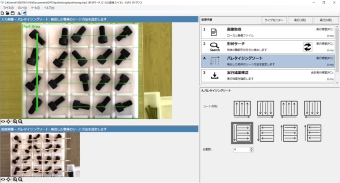
검출한 워크를 특정 규칙으로 정렬하는 기능입니다. 정렬 방향ㆍ분할 수를 바탕으로 워크의 정렬 순서를 정할 수 있습니다.
【OS】Windows® 10 / 11
【PC】CPU 멀티 코어 프로세서 2GHz, 메모리 4GB, HDD 4GB 이상
【로봇 컨트롤러】
RC9 Ver.1.0.* 이후
RC8 Ver.2.11.1 이후
RC8□-□□□□ー□□E□ー□□ー□□□
RC8□-□□□□ー□□C□ー□□ー□□□
(로봇 컨트롤러 모델은DENSO ROBOT USER MANUALS의 "컨트롤러 모델"
(ID : 1314)을 참조하십시오. )
COBOTTA Ver.2.11.1 이후
【권장 카메라】
Basler GigE 카메라(ace 시리즈)
iDS USB 카메라(uEye SE 시리즈)
Canon 네트워크 카메라(WebView Livescope 시리즈)
Canon 네트워크 카메라(N10-W02)
120만 화소(1280×960) 이하를 추천
※Windows는 Microsoft Corporation의 미국 및 기타 국가에서의 상표 또는 등록 상표입니다.
·카메라 캘리브레이션은 체스 보드를 읽기만하면 완료.
·로봇과 카메라의 캘리브레이션은 위저드에 따라 진행하기만 하면 완료.
•화상처리 플로를 프로그램 리스의 간단한 조작으로 설정 가능.
•여러 대의 모델을 등록할 수 있어 품종이 혼재하더라도 인식 가능.
•실행 시 티칭 펜던트에 결과를 표시할 수 있어 PC가 필요 없음.
•화상처리결과를 로봇 포지션형 변수(P형)에 출력하므로 화상처리와 통신 프로그램이 필요 없음.
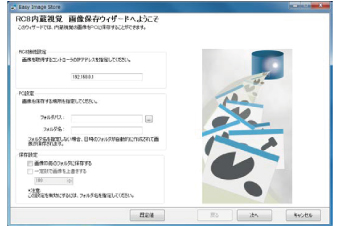
위저드 형식으로 로봇 컨트롤러와 PC 사이의 접속이나 화상을 저장하는 곳을 간단히 설정할 수 있습니다.
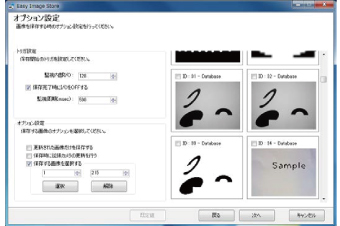
로봇 컨트롤러의 내부 I/O 번호와 감시 주기를 트리거로 설정함으로써 임의의 주기로 화상 저장이 가능합니다.





덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)