
別記事でも触れましたが、デンソーロボットの強みといえば、パワフルかつオープンは開発環境です。その開発環境を実現するポイントは、デンソーロボット言語「PacScript」とミドルウェア「ORiN」です。
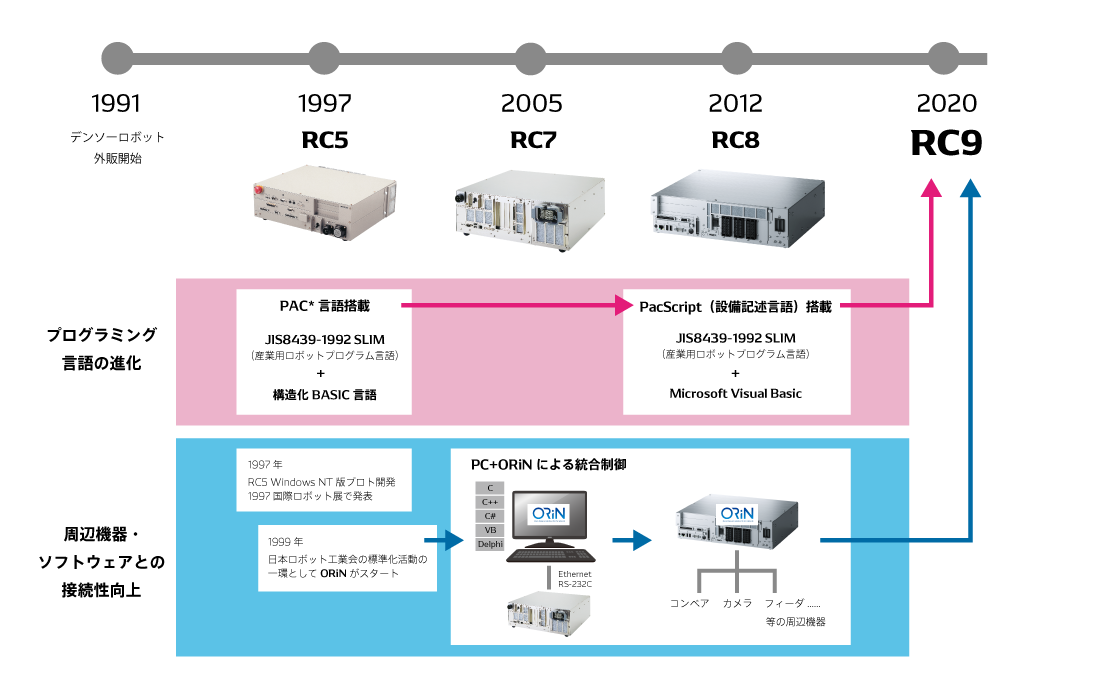
「PacScript」はデンソーロボットを制御するためのプログラミング言語で、産業用ロボットのプログラミング言語"SLIM言語"をもとに、Microsoft社のVisual Basicに高い親和性を持たせました。そのため、フロー制御や算術関数など、ロボット動作以外のコマンドも多数用意されています。
また、「ORiN」とは、ロボットをはじめとする各種FA機器やデータベースなど、標準的な通信インターウェースを提供するミドルウェアです。メーカーによって機器の制御方法が異なりますが、ORiNを使うことで使い慣れた開発環境での制御を行うことができ、設備の立ち上げや仕様変更時の工数削減に大きく貢献します。
RC8では、約450種類のコマンド(PacScript)と約200種類のプロパイダ(ORiN)を使用したパワフルな開発環境を提供してきました。
ここで、RC8とRC9の構成を比較してみます。
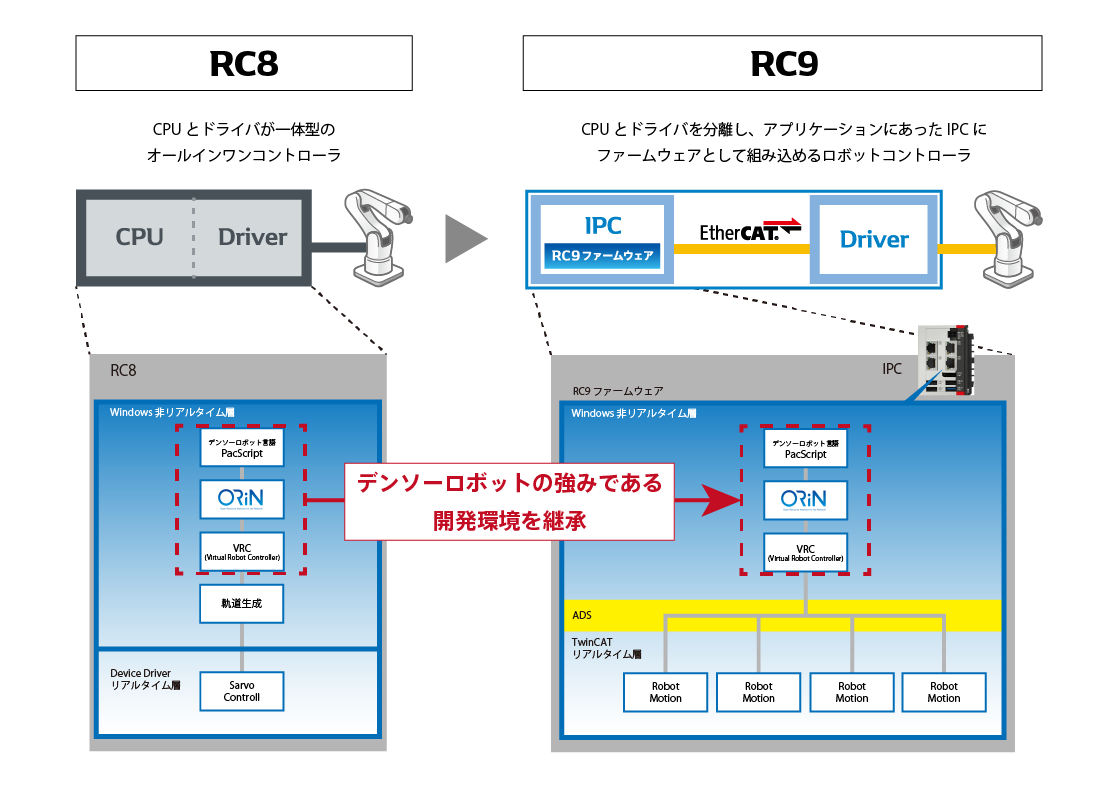
従来からある高性能ロボットコントローラ「RC8」は、CPUとDriverが一体となったオールインワン型のコントローラです。 内部の構成としては、Windows(非リアルタイム層)とDeviceDriver(リアルタイム層)に分かれています。 Windows層にミドルウェアのORiNとVRCが用意されており、そのもとで軌道生成が行われています。
それに対し、RC9ではCPUとDriverを分断しEtherCATで接続するという構成を採用しました。 内部の構成としてはWindows(非リアルタイム層)とTwinCAT(リアルタイム層)に分かれています。
構成は変化しているものの、赤枠で囲んだ「ORiN」「VRC」「PacScript」部分はRC8と同様の構成になっており、デンソーロボットの強みであるオープンな開発環境を完全に継承しています。大きく違うのは、軌道生成の部分です。軌道生成をWindows層ではなく、TwinCATのリアルタイム層で実行することで、RC8より高速な軌道生成が可能となりました。
高機能になっただけではなく、さらにプログラミングや操作がしやすいロボットコントローラを目指し、様々なオプション製品や機能を提供しています。

RC9用のティーチングペンダントです。画面を大きくし、持ちやすい形状に変えたため、操作性が向上しました。 また、従来のディスプレイとしての機能(VGA)のみのティーチングペンダントと異なり、ティーチングペンダント自体にCPUとOSが組み込まれています。 OSが組み込まれたことにより、WINCAPS Plus用UIなどのアプリケーションを追加、表示させることが可能となりました。
また、RC9ではTC3 HMIを活用可能です。TC3 HMIを使うことで、誰もが直感的にわかるグラフィカルな操作盤を作成できます。スマートTPに表示することができるため、PLCから制御するロボット以外の設備(コンベアなどの周辺設備)に関する操作もスマートTPから行うことができ、スマートTPを設備全体の操作盤として使用できます。
新しく機能を追加しつつも、開発環境は大きく異なりません。 例えばロボットプログラムを作成するためのソフトウェア「WINCAPS III」は従来同様使用可能ですし、ティーチングペンダントとしてもRC8互換UIが用意されているため、今までと同じ感覚で操作していただけます。
人協働ロボットの 「COBOTTA」を手元で操作し、その動きを安全柵内に設置されているロボットに追従させてティーチングの支援や操作を行うオプション機能です。 COBOTTAとスレーブロボットをEtherNetケーブルで繋げるだけで使用できる非常にシンプルな構成となっています。 COBOTTAのグリッパ開閉用ボタンを、スレーブロボットグリッパのON/OFFに割り付ける機能や、 スレーブロボットが設定したエリア外に移動しようとした場合には、COBOTTAが反力を返し、エリア外であることを知らせるバーチャルフェンス近傍判定機能が用意されています。 また、座標系を考えながら操作する必要がないため、より直感的なロボットの教示操作が可能です。 医薬品製造工程などのクリーン環境、溶接現場など危険な環境の外からの操作が可能なため、異物混入や作業者の汚染を防ぎます。













































