RC Vision is a robot vision application software package that utilizes DENSO Robotics and cameras to support equipment startup.
This software offers enhanced functionality and several times greater processing power than the previous EVP application, while maintaining the same ease of operation.
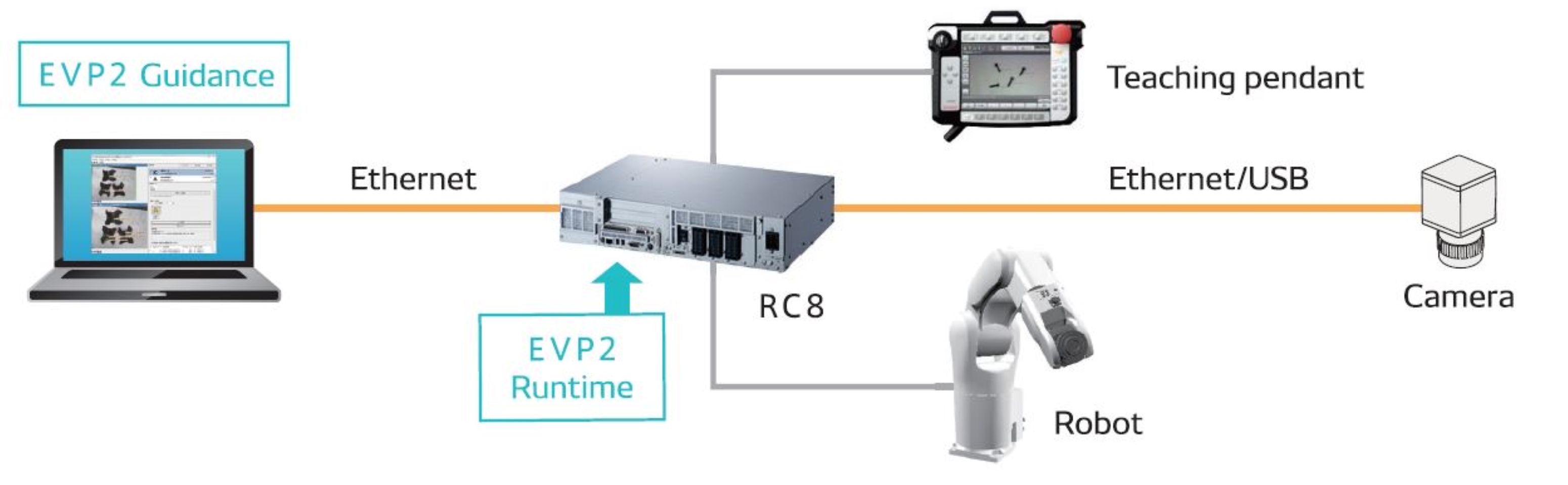
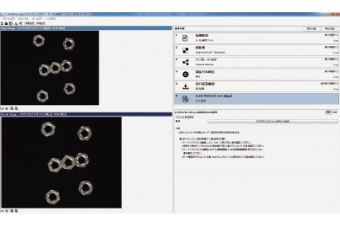
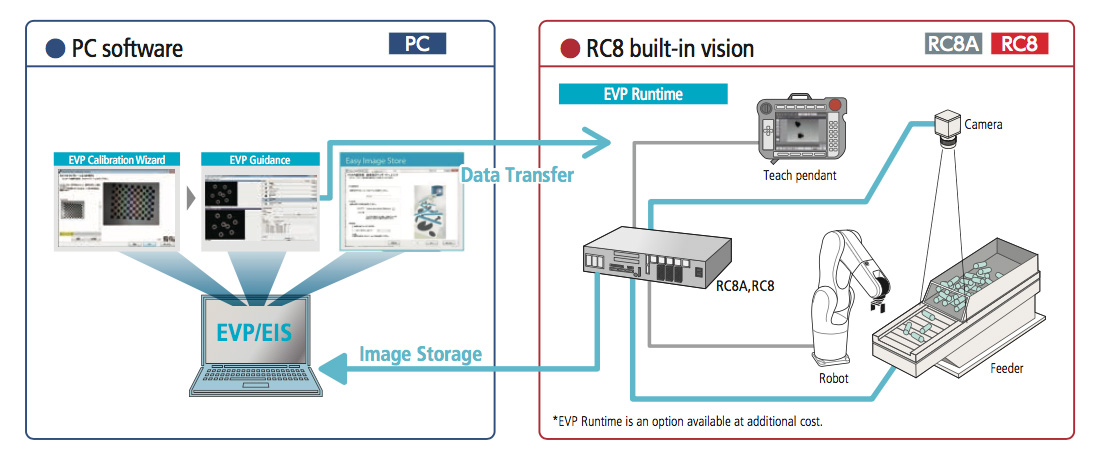
Image processing operations can be set using the application (EVP2 Guidance) that runs on a PC.
When EVP2 Runtime is running, only the robot controller and connected camera are required for operation.
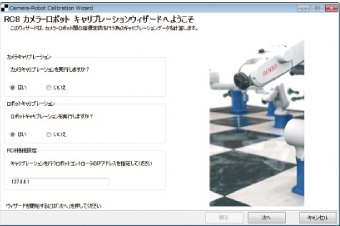
・Simply loading the chess board completes the camera calibration.
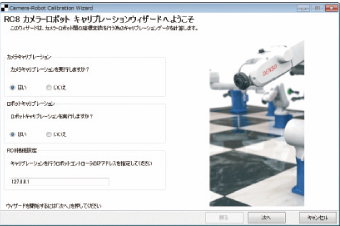
・A user simply follows the wizard to complete calibration of the robot and camera.
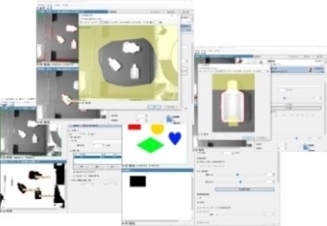
・Simple, programming-less setting of image processing flow
・Versatile search function
Shape search
Contrast search
Blob search
Color search
Auxiliary search
・Convenient functions
Model masking
Search area editing
Detection method selection
・Low price realized by the system that uses the built-in robot vision application in the robot controller for image processing
・Simple configuration
No PC required
No visual controller required
No communication program required for sending image processing results to the robot
A wide range of compatible cameras
・Significantly improved image processing library and faster image recognition speed (as compared to EVP)
Contrast search
Shape recognition
Blob recognition
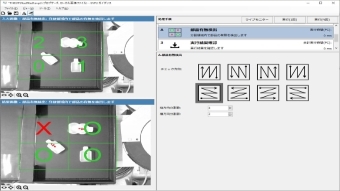
This function determines whether the detected workpiece is located within the specified area.
The area can be specified based on the check direction, the number of longitudinal divisions and the number of lateral divisions.

This function prevents the end effector from colliding against adjacent workpieces when grasping the detected workpiece.

During the EVP2 component distribution step, the position of the feeder can be controlled by dividing the area and accurately identifying the location of each part.
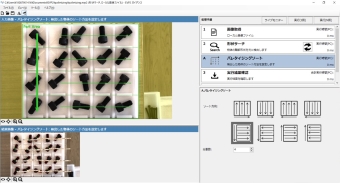
This function sorts the detected parts according to the specified rule.
The workpiece sort sequence can be decided based on the sorting direction and the number of divisions.
[OS] Windows® 10 / 11
[PC] 2 GHz or faster multi-core CPU, 4 GHz or more RAM, 4 GB or larger HDD
[Robot controller]
RC9 Ver.1.0.* or later
RC8 Ver.2.11.1 or later
RC8□-□□□□ー□□E□ー□□ー□□□
RC8□-□□□□ー□□C□ー□□ー□□□
(For the robot controller model,
"Controller model" of DENSO ROBOT USER MANUALSSee (ID: 1314). )
COBOTTA Ver.2.11.1 or later
[Recommended cameras]
GigE camera Area sendor camera ace series (Manufacturer: Basler)
USB camera USB2 uEye SE series (Manufacturer: iDS)
Network camera WebView Livescope series (Manufacturer: Canon)
Network camera N10-W02 (Manufacturer: Canon)
1.2 million pixels (1280×960) or lower resolutions are recommended.
* Windows is a trademark or registered trademark of Microsoft Corporation in the United States and other countries.
・Simply loading the chess board completes the camera calibration.
・A user simply follows the wizard to complete calibration of the robot and camera.
・An image processing flowchart can be configured by easy operation without using a program.
・Multiple models can be registered and recognized even in a mixed product environment
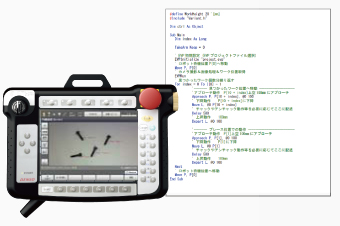
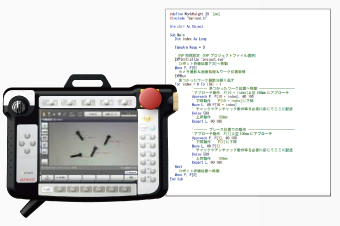
・Results can be shown on the teach pendant during execution, making a PC unnecessary.
・mage processing and communications programs are not needed to output image processing results to the robot position type (P type) variable.
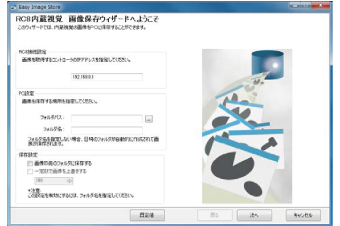
Using the wizard, users can easily connect the robot controller to a PC and set places where images are stored.
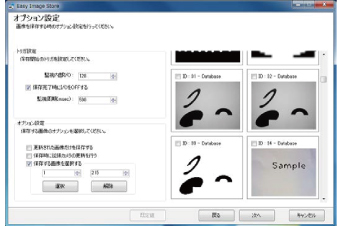
By setting internal I/O numbers of the robot controller and monitoring intervals as triggers, images can be stored with arbitrary timing.





If you have not registered
The services on this member site are available only for registered customers.




































