机械手视觉应用软件包,支持用户投入使用利用DENSO机械手与摄像头的设备。
沿用了旧版应用程序EVP的简便操作性,实现了功能扩展与高达数倍的处理能力提升。
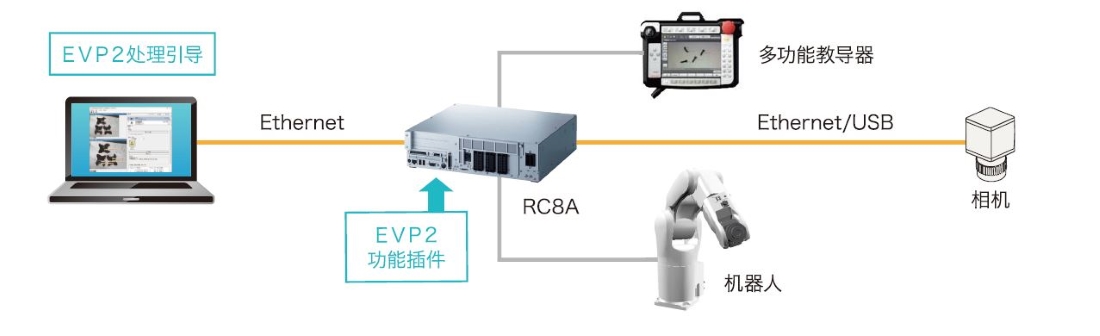
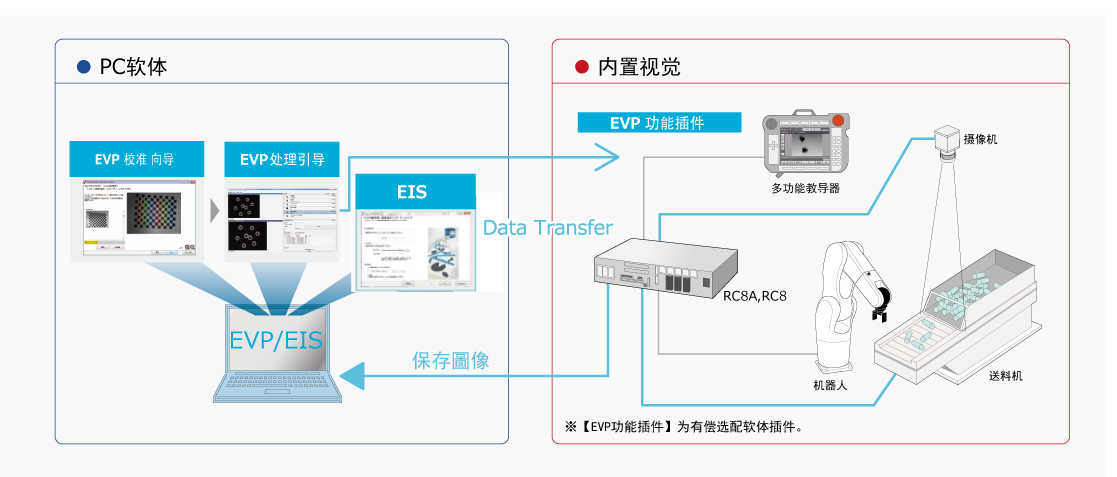
图像处理的设定可通过计算机上的应用程序(EVP2处理引导)进行。
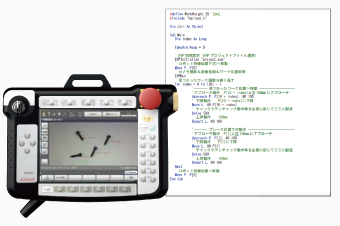
执行时(EVP2功能插件),可以仅用连接至机器人控制器的相机执行动作。
摄像头的校准只需让其读取棋盘即可完成。
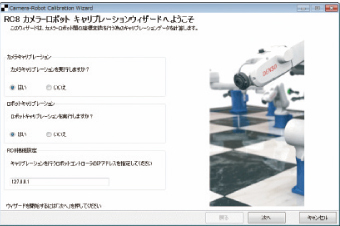
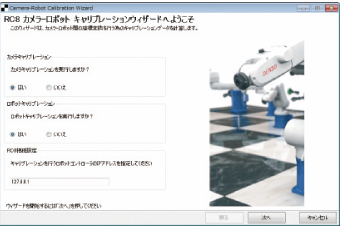
机械手与摄像头的校准只需跟从向导程序即可完成。
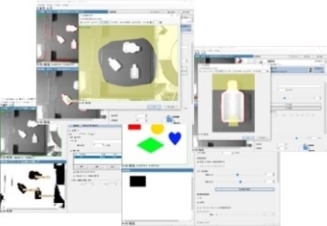
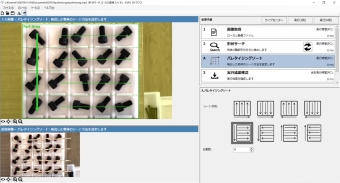
无需编程就能用简单的操作设定图像处理流程
・丰富的搜索功能
形状搜索
浓淡搜索
块搜索
颜色搜索
多阶层搜索
・便捷的功能
模型掩膜
搜索区域编辑
检测方法切换
・能借助机器人控制器内置视觉执行图像处理,实现更低的价格
・简单的结构
无需计算机
无需视觉控制器
不必通过通信程序将图像处理结果传输到机器人
能够选择的相机种类丰富
・大幅更新了图像处理数据库,大大加快了识别速度(与EVP对比)
浓淡搜索
形状检测
块检测
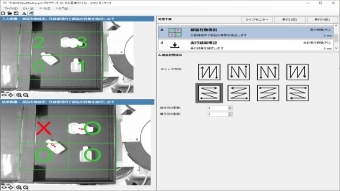
判定检测到的工件是否位于特定区域中的功能。
可根据检查方向、纵向分割数、横向分割数决定区域。

在抓握检测到的工件时,避免末端执行器撞击相邻工件的功能。

在部件分布检测步骤中,对供给装置的位置进行区域分割及设定,可以判断各区域的部件分布状态,妥善控制供给装置。
以特定规则对检测到的工件进行分类的功能。可以根据分类方向和分割数决定工件的分类顺序。
【OS】Windows® 10 / 11
【PC】CPU多核处理器2GHz、内存4GB、HDD 4GB以上
【机器人控制器】
RC9 Ver.1.0.*以上
RC8 Ver.2.11.1以上
RC8□-□□□□ー□□E□ー□□ー□□□
RC8□-□□□□ー□□C□ー□□ー□□□
(对于机器人控制器型号,DENSO ROBOT用户手册的“控制器型号”参见(ID:1314)。 )
COBOTTA Ver. 2.11.1以上
【推荐相机】
Basler生产的GigE相机(ace系列)
iDS生产的USB相机(uEye SE系列)
Canon生产的网络相机(WebView Livescope系列)
Canon生产的网络相机(N10-W02)
建议使用120万像素 (1280 x 960) 或更低像素
※Windows是微软公司在美国及其他国家的商标或注册商标。
摄像头的校准只需让其读取棋盘即可完成。
机械手与摄像头的校准只需跟从向导程序即可完成。
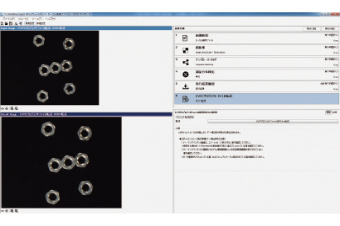
图像处理流程设置无需程序,通过简单的操作即可完成。
可注册多种型号,品种相混亦能识别。
执行时,结果可在教导器上显示,无需使用电脑。
图像处理结果输出成位置类型变量(P类型),无需使用图像处理和通信程序。
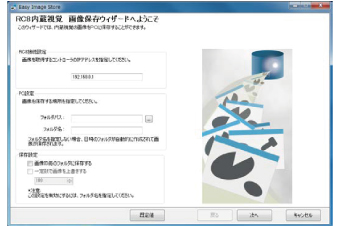
可以向导的形式轻松设置机械手与PC之间的连接以及图像保存目的地。
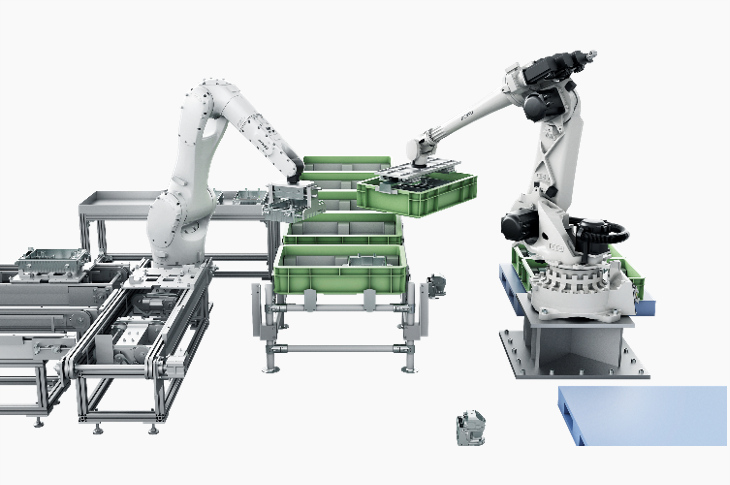
RC Vision展现示意图
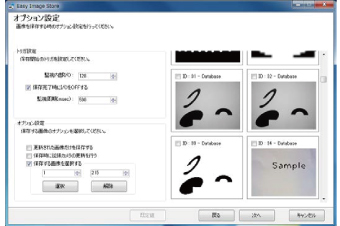
将机械手控制器内部I/O号与监控周期设置为触发器,可在任意时间点保存图像。
为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)