





2023国際ロボット展では基本コンセプト「オープンプラットフォーム」を軸にして 「COBOTTA PRO」、「TwinCAT」、「AI Solution」、「System Solution」、「DX・Digital Twin」、「Energy Management」の6種類のゾーンを設けました。 それぞれのゾーンにオープン化の背景と、オープン化がもたらす「作り手」と「使い手」の嬉しさがあり、このセミナーで詳しく解説します。


AMRを活用した自律搬送・組立システム
COBOTTA PROをAMR(自律走行搬送ロボット)に搭載することで、工程内を自律走行し、組立~ネジ締めと広範囲かつ多工程の作業を自動化します。
説明パネルを見る
人とロボットのキックボード協働組立作業
キックボードのタイヤ脱着、ハンドル組立の協働作業を実演します。人とロボットがコミュニケーションをとり、互いの作業を助け合う協働ロボットならではの自動化をご提案します。
説明パネルを見る
簡単・高精度 誰もが使いやすいティーチングシステム
初めてロボットを扱う方から操作に慣れた熟練者の方までが抱えられている課題を充実した支援機能で解決します。ファインダイレクトティーチング、イージーブロックプログラミングを是非、ご体験ください。
説明パネルを見る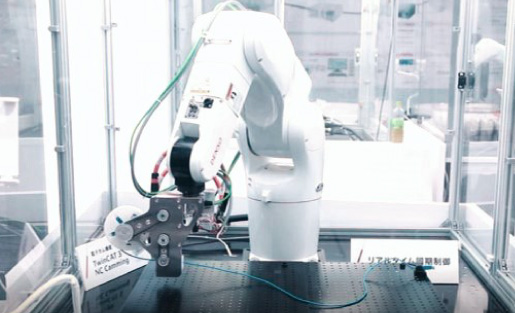

音声認識機能による直接ロボット制御
音声指示によりロボットに指令を与え、ロボットを制御します。
両手がふさがっていても簡単にロボット操作を行うことを可能にしました。是非、ご体験ください。


自然言語でのオーダーに応じるAIスキルを活用した自動コーヒー調合ロボット
音声指示からロボットがコーヒーを作ります。ChatGPTにより曖昧・複雑な指示を理解でき、AI模倣学習のスキルにより指示された掬う、注ぐ、混ぜる等の動作を高精度に再現します。
説明パネルを見る
ChatGPTを活用した自然言語によるロボットプログラムの生成
自然言語で作業内容をChatGPTに伝えることでロボットのプログラムが生成されます。近い将来、専門知識の少ない初心者でもロボットが簡単に扱えるという可能性をご紹介します。是非、ご体験ください。
説明パネルを見る
AI搭載の3Dビジョン Mech-Eyeによるマスタレスピッキング
AI搭載の高精度3Dビジョンシステム「Mech-Eye」のディープラーニング技術を用いた日用品の画像認識・ピッキング作業を行います。新規開発の吸着部の角度が可変可能なオリジナルハンドによりワークの取り残しの無いピッキングを実現。
説明パネルを見る
複数台ロボット最適経路計画による
“ぶつからない”高速ワーク整列
複数台のロボットと周辺機器が干渉しない最短のサイクルタイムの経路をAIが自動生成し電子カムで制御します。複数台ロボットの難しいプログラミングや調整作業の負荷軽減を実現します。
説明パネルを見る
AI搭載の3Dビジョン Cambrianによる小サイズ・透明・光沢ワークピッキング
Cambrian社の3Dビジョンシステムを活用することで、従来の3Dマシンビジョンが苦手としていた小サイズ・透明・光沢ワークのバラ積みピッキングを実現します。
説明パネルを見る
COBOTTA LAB ラボラトリオートメーション
COBOTTAによりシステム全体を統合制御する標準セルが研究室の自動化を実現します。粉体秤量、pH測定、混合・攪拌、濾過、薄膜生成の5種類の作業を自動化し、AMRに搭載したCOBOTTA PROがCOBOTTA標準セルの工程間搬送を行うことで、一連の作業を自動化します。
説明パネルを見る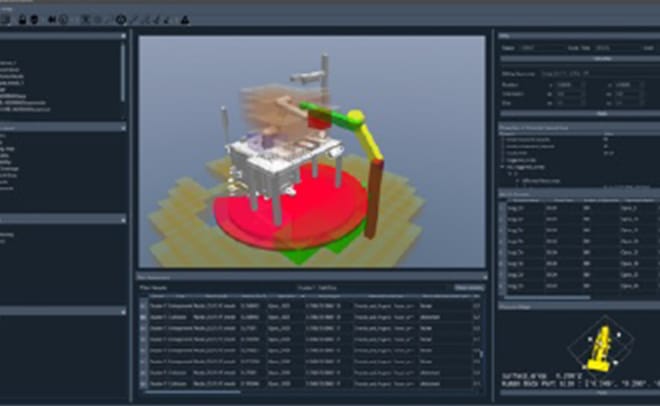

COBOTTA PROと3Dビジョンを活用したバラ積みピッキング
ロボットの導入経験がなく、設備や仕様の検討が難しい場合でも、ユニット選択することで簡単かつスピーディーに導入可能なロボットシステムパッケージです。COBOTTA PROと高精度3Dビジョン「Mech-Eye」を組み合わせた部品組付デモをご紹介します。
説明パネルを見る
ゲームエンジン「Unity」を活用したロボットシステムのデジタルツイン(VR体験)
ゲーム開発エンジン「Unity」のプラットフォームによるデジタルツインを提供します。
Unityの強みを活かしたバーチャル空間ならではのIoTとロボットティーチングを提案します。
協賛展示:ユニティ・テクノロジーズ・ジャパン株式会社 / realvirtual
GmbH
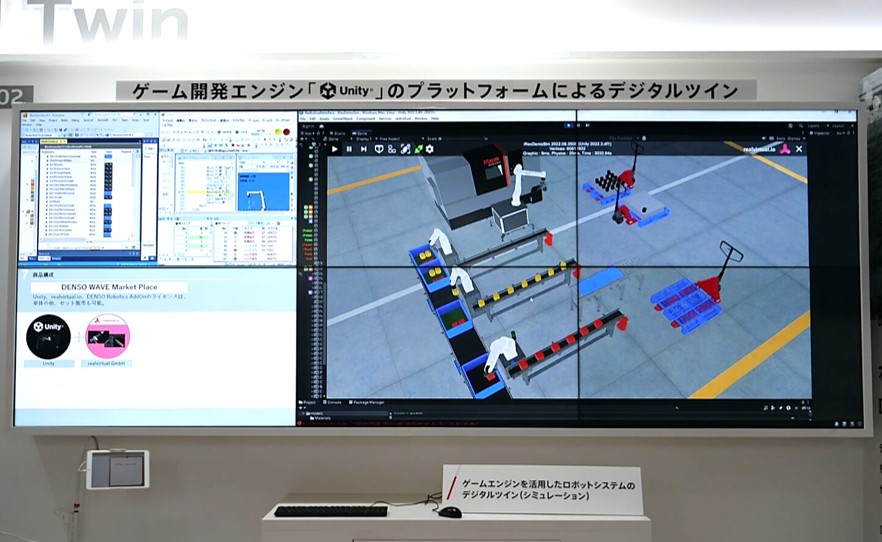
ゲームエンジン「Unity」を活用したロボットシステムのデジタルツイン(シミュレーション)
ゲーム開発エンジン「Unity」のプラットフォームによるデジタルツインを提供します。
realvirtual.ioをアドオンすることで、CADインターフェイス、キネマティック
コンポーネント、ドライブ、センサー、TwinCAT、OPC
UA等のインターフェイスが提供でき、ロボットセルから製造ラインまで幅広いデジタルツインが実現できます。
協賛展示:ユニティ・テクノロジーズ・ジャパン株式会社 / realvirtual
GmbH

ロボットデジタルプラットフォームRoboCrossによるDX
川崎重工業株式会社が立ち上げるロボットデジタルプラットフォームRoboCrossに参画することで、データの利用・活用を促進し、社会問題解決とお客様の企業価値向上を目指します。
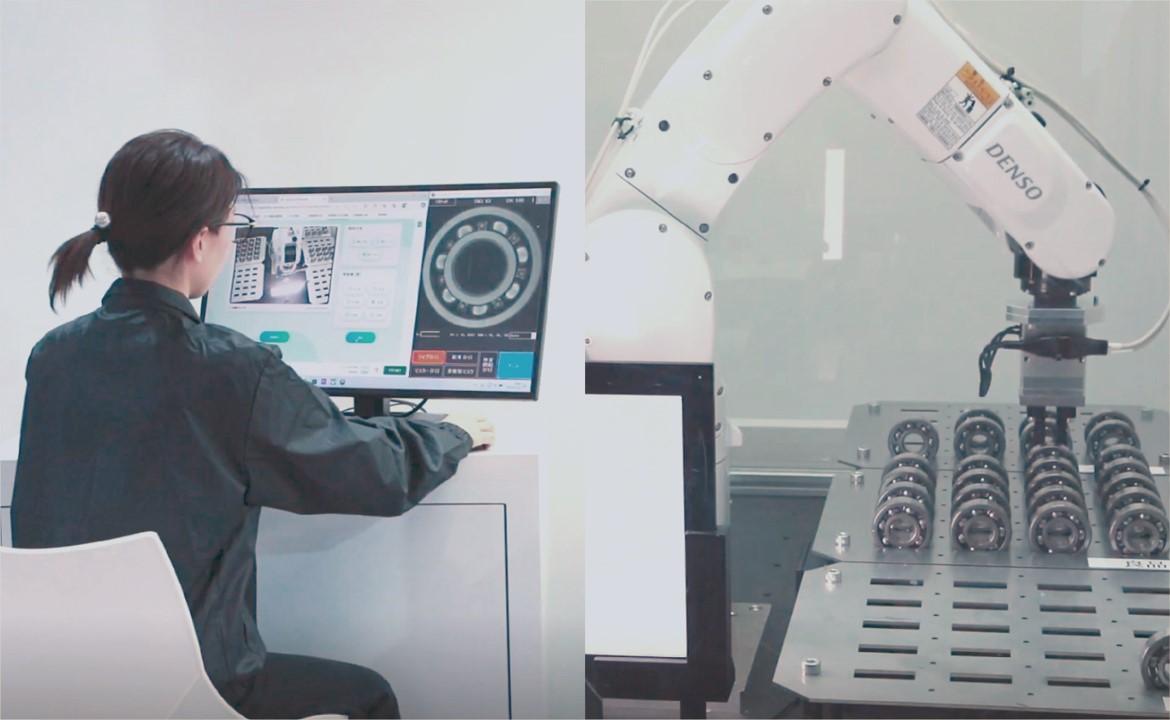
ロボット遠隔操作サービスを活用した外観検査システム
ロボットを介したリモートワークを実現するクラウドサービス「Remolink」を活用し、リモートで人とロボットが共に働く新しい自動化をご提案します。
協賛展示:リモートロボティクス株式会社 / TDSE株式会社

エネルギー監視システムによるカーボンフットプリントとエネルギーロスへの対策
さまざまなFA機器のデータを集約し、消費電力量と設備稼働情報を収集、可視化します。エネルギー使用量を正確に把握することで、カーボンフットプリントへ貢献します。
説明パネルを見る※セミナー・特別講演は全て事前参加申し込みが必要です。定員がございますのでお早めにお申し込みくださいませ。
2023国際ロボット展では基本コンセプト「オープンプラットフォーム」を軸にして 「COBOTTA PRO」、「TwinCAT」、「AI Solution」、「System Solution」、「DX・Digital Twin」、「Energy Management」の6種類のゾーンを設けました。 それぞれのゾーンにオープン化の背景と、オープン化がもたらす「作り手」と「使い手」の嬉しさがあり、このセミナーで詳しく解説します。

RC9は、BECKHOFF社製IPCを搭載したことにより、リアルタイム制御ソフトウェア「TwinCAT」とロボットを組み合わせたアプリケーションをユーザーで開発することが可能です。 このセミナーでは、実際に開発した3つのデモシステムを通して、具体的なアーキテクチャやその開発方法をご紹介します。
ハンドアイタイプのステレオビジョン「Cambrian」は、従来の3Dビジョンでは認識が難しい、透明・光沢・小物ワークを高速・高精度に認識します。 Cambrianの高速撮影とTwinCATのリアルタイム制御を組み合わせることで実現した“止めない撮影”の仕組みについて解説します。
複数台のロボットに対するティーチングは、互いが衝突せず、動作時間が短い最適な経路で動くよう調整しなくてはならず、非常に難しい作業です。 開発したAIアルゴリズムは、熟練者の知見を反映することで、最適な経路を実用的な計算時間で算出可能で、実証試験では作業時間を20%以上低減しました。 この開発したAIアルゴリズムの仕組みや性能について、実証試験の内容をもとにご紹介します。
ChatGPTを活用し、自然言語でロボットの動作を指示することで、ロボットプログラムへ変換・出力するシステムを開発しました。 ChatGPTが持つ言語処理能力の活用やロボットプログラムへの変換ルール設定など、ロボットプログラムの簡単化への取り組みをご紹介します。
高難度作業の自動化を実現する「AI模倣学習」をカスタムし、アプリケーション毎に特化させた「AIスキル」によって、AIの更なるパフォーマンス向上を実現しました。 美味しいコーヒーを調合するシステムでは、LLMを用いた自然言語命令からのロボットプログラム生成にAIスキルを組み込むことができるIntegral Task Plannerを搭載しています。 このセミナーではAIを活用したロボット技術について解説します。


ゲームエンジンUnityを活用することで、デジタルツイン環境を短い時間で構築でき、現実を超えた新しい可能性を生み出すことができます。 Unityとデンソーロボットの接続やrealvirtal.ioによる3Dモデルの動作定義、PLC連携など、デジタルツイン構築工程を、実演を交えて解説します。
「良品学習」による外観検査AIと、遠隔操作による「人の判断」を組み合わせたAI外観検査ロボットシステムをご紹介します。 過去の失敗で学んだ外観検査システムの提供範囲、AIが必要な理由、遠隔操作のビジネスモデルや、ロボットと組み合わせることで期待できる相乗効果やオペレーションイメージについて解説します。
ロボット検証テストでニーズの多い、3Dビジョンアプリケーションを搭載したロボットシステムをパッケージとしてご用意しました。 システムの標準化を行った設計思想と機能開発について解説します。 また、シミュレーションを活用したリスクアセスメント支援サービスも準備しており、システム構築、稼働前準備、保守まで一貫して提供するサポートについてご紹介します。
2050年カーボンニュートラル社会の実現に向けた活動として、再生可能エネルギーへの転換やCO2吸収プラント導入等の手段がある中、生産設備の省エネを愚直に進める事も引き続き重要です。 当社のIoT製品により、消費エネルギーのモニタ(把握)だけに留まらず、生産設備の運転状況を重ねることで新たな気付きが得られ、消費低減と生産効率向上を目指す取り組みをご紹介します。
バラ積みピッキング用に、深い箱からでもワークを取り出しやすいフリップグリッパーを開発しました。 3Dビジョン「Mech-Eye」の学習済みAIモデル「SuperModel」の解説と共に、ビジョンと連動して動くグリッパーの制御についてご紹介します。
人協働ロボットCOBOTTA PROとAMRを組み合わせることにより、多工程の手作業を自動化しました。 自律搬送・組立システムのアーキテクチャから統合制御方法まで、どのような技術が必要なのか、システムの全貌をご紹介します。
ラボラトリーオートメーション「COBOTTA LAB」では、単一工程を担うCOBOTTAと、工程間搬送を行うCOBOTTA PROを組み合わせることにより、一連の実験工程の自動化を実現しました。 このセミナーでは、これまでのラボラトリオートメーションへの取り組みのご紹介と、COBOTTA LABにおける各工程の自動化手法及びその技術について解説します。
2023国際ロボット展では基本コンセプト「オープンプラットフォーム」を軸にして 「COBOTTA PRO」、「TwinCAT」、「AI Solution」、「System Solution」、「DX・Digital Twin」、「Energy Management」の6種類のゾーンを設けました。 それぞれのゾーンにオープン化の背景と、オープン化がもたらす「作り手」と「使い手」の嬉しさがあり、このセミナーで詳しく解説します。
room ARC9は、BECKHOFF社製IPCを搭載したことにより、リアルタイム制御ソフトウェア「TwinCAT」とロボットを組み合わせたアプリケーションをユーザーで開発することが可能です。 このセミナーでは、実際に開発した3つのデモシステムを通して、具体的なアーキテクチャやその開発方法をご紹介します。
room Bハンドアイタイプのステレオビジョン「Cambrian」は、従来の3Dビジョンでは認識が難しい、透明・光沢・小物ワークを高速・高精度に認識します。 Cambrianの高速撮影とTwinCATのリアルタイム制御を組み合わせることで実現した“止めない撮影”の仕組みについて解説します。
room A複数台のロボットに対するティーチングは、互いが衝突せず、動作時間が短い最適な経路で動くよう調整しなくてはならず、非常に難しい作業です。 開発したAIアルゴリズムは、熟練者の知見を反映することで、最適な経路を実用的な計算時間で算出可能で、実証試験では作業時間を20%以上低減しました。 この開発したAIアルゴリズムの仕組みや性能について、実証試験の内容をもとにご紹介します。
room BChatGPTを活用し、自然言語でロボットの動作を指示することで、ロボットプログラムへ変換・出力するシステムを開発しました。 ChatGPTが持つ言語処理能力の活用やロボットプログラムへの変換ルール設定など、ロボットプログラムの簡単化への取り組みをご紹介します。
room A高難度作業の自動化を実現する「AI模倣学習」をカスタムし、アプリケーション毎に特化させた「AIスキル」によって、AIの更なるパフォーマンス向上を実現しました。 美味しいコーヒーを調合するシステムでは、LLMを用いた自然言語命令からのロボットプログラム生成にAIスキルを組み込むことができるIntegral Task Plannerを搭載しています。 このセミナーではAIを活用したロボット技術について解説します。
room BゲームエンジンUnityを活用することで、デジタルツイン環境を短い時間で構築でき、現実を超えた新しい可能性を生み出すことができます。 Unityとデンソーロボットの接続やrealvirtal.ioによる3Dモデルの動作定義、PLC連携など、デジタルツイン構築工程を、実演を交えて解説します。
room B「良品学習」による外観検査AIと、遠隔操作による「人の判断」を組み合わせたAI外観検査ロボットシステムをご紹介します。 過去の失敗で学んだ外観検査システムの提供範囲、AIが必要な理由、遠隔操作のビジネスモデルや、ロボットと組み合わせることで期待できる相乗効果やオペレーションイメージについて解説します。
room Aロボット検証テストでニーズの多い、3Dビジョンアプリケーションを搭載したロボットシステムをパッケージとしてご用意しました。 システムの標準化を行った設計思想と機能開発について解説します。 また、シミュレーションを活用したリスクアセスメント支援サービスも準備しており、システム構築、稼働前準備、保守まで一貫して提供するサポートについてご紹介します。
room B2050年カーボンニュートラル社会の実現に向けた活動として、再生可能エネルギーへの転換やCO2吸収プラント導入等の手段がある中、生産設備の省エネを愚直に進める事も引き続き重要です。 当社のIoT製品により、消費エネルギーのモニタ(把握)だけに留まらず、生産設備の運転状況を重ねることで新たな気付きが得られ、消費低減と生産効率向上を目指す取り組みをご紹介します。
room Aバラ積みピッキング用に、深い箱からでもワークを取り出しやすいフリップグリッパーを開発しました。 3Dビジョン「Mech-Eye」の学習済みAIモデル「SuperModel」の解説と共に、ビジョンと連動して動くグリッパーの制御についてご紹介します。
room B人協働ロボットCOBOTTA PROとAMRを組み合わせることにより、多工程の手作業を自動化しました。 自律搬送・組立システムのアーキテクチャから統合制御方法まで、どのような技術が必要なのか、システムの全貌をご紹介します。
room Aラボラトリーオートメーション「COBOTTA LAB」では、単一工程を担うCOBOTTAと、工程間搬送を行うCOBOTTA PROを組み合わせることにより、一連の実験工程の自動化を実現しました。 このセミナーでは、これまでのラボラトリオートメーションへの取り組みのご紹介と、COBOTTA LABにおける各工程の自動化手法及びその技術について解説します。
room B※出展内容・セミナー内容は変更になる場合がございます。
※展示会場のみ17:00まで
住所:〒550-0023
大阪府大阪市西区千代崎3丁目中2-1
住所:〒105-7501
東京都港区海岸1-7-1 東京ポートシティ竹芝
住所:〒448-0027
愛知県刈谷市相生町1丁目1番地6