高機能、低価格。軽量でコンパクトなスカラロボットが登場!
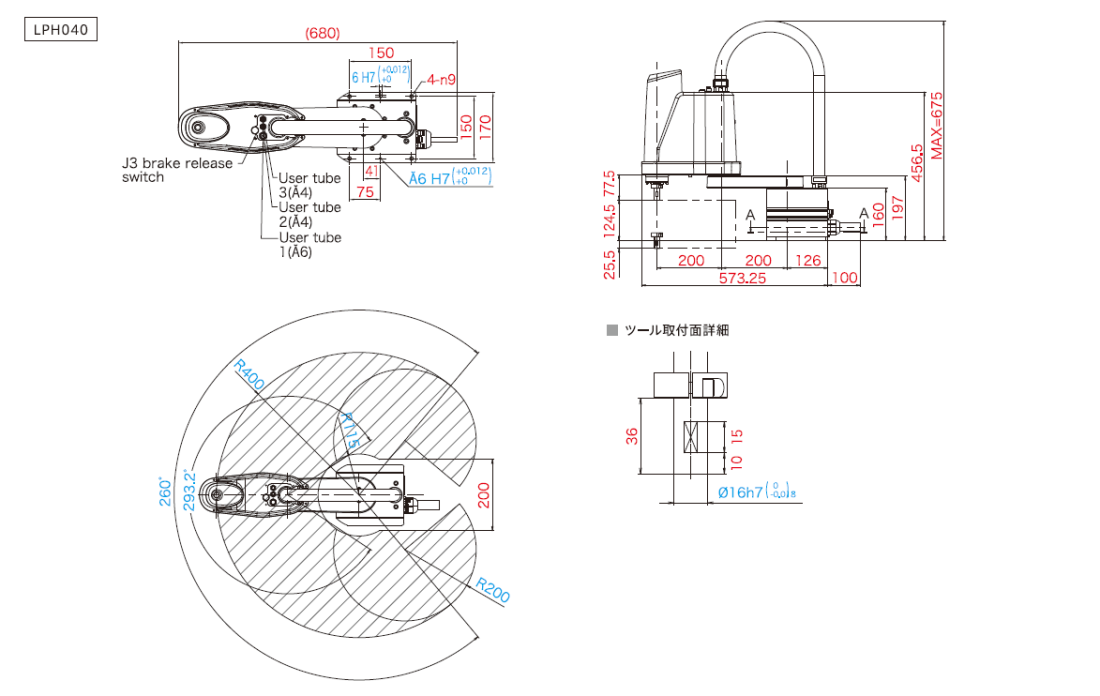
アーム長|400mm
最大可搬質量|3kg
位置繰返し精度|±0.02mm
設置方法|床置き
ピック&プレースに特化した画像処理アプリケーションEVP2をコントローラへ内蔵可能です。
プログラミングレスで画像処理を簡単設定できます。
>EVP2製品ページはこちら>EVP2カタログダウンロードはこちら
T軸の最大許容慣性モーメントが大きいため、ハンド設計の自由度が高いことが特長です。オーバーハングしたハンド形状などにも対応しています。
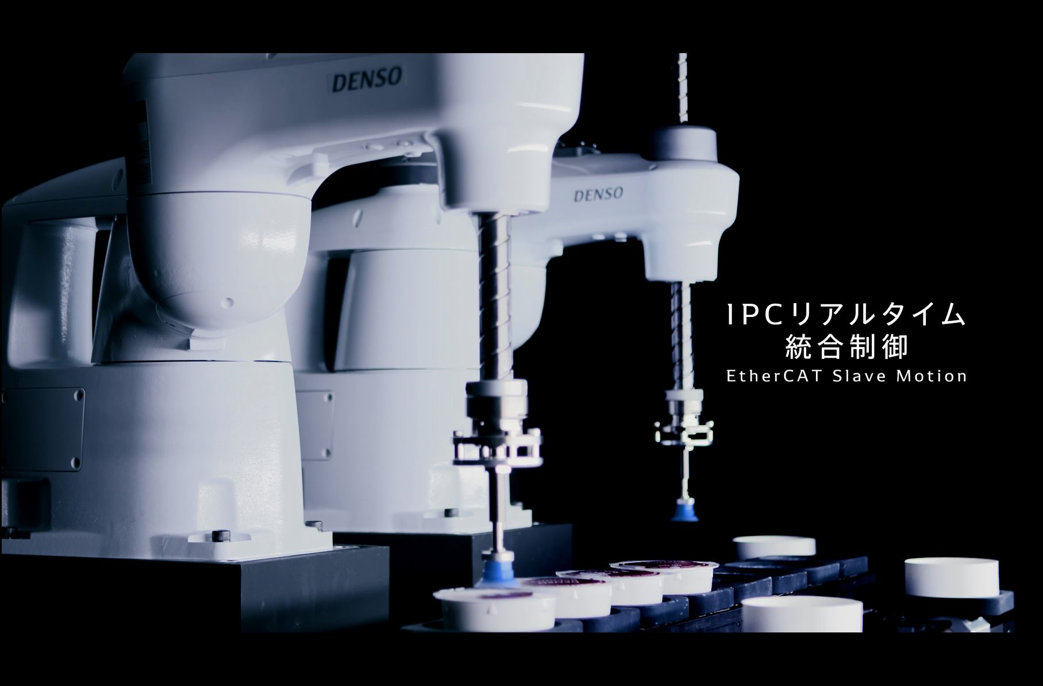
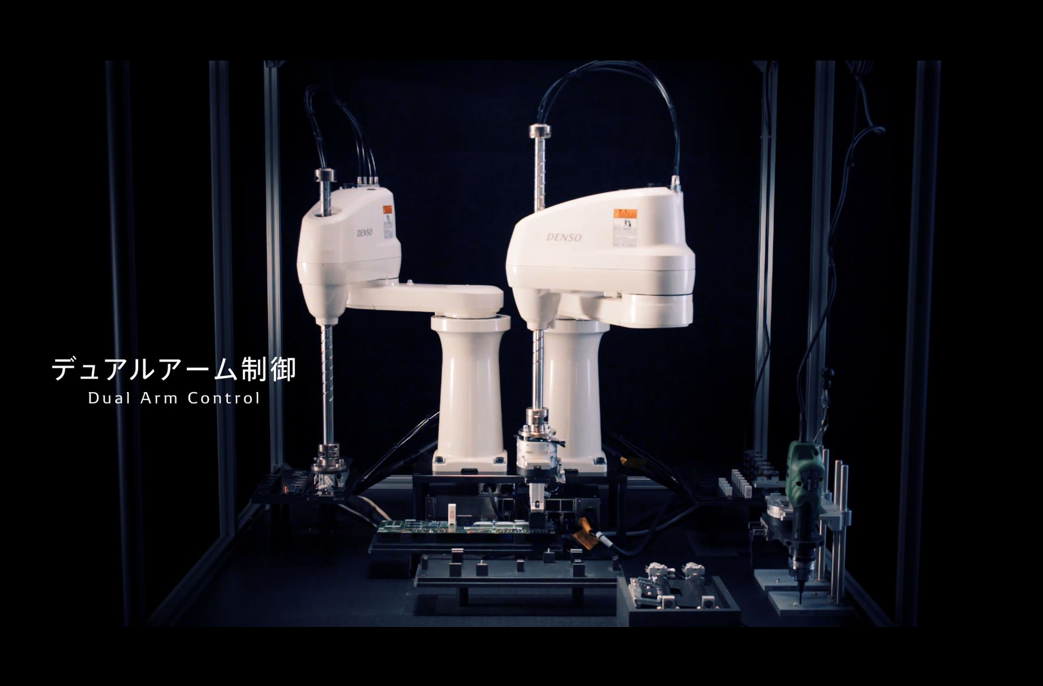
高機能コントローラRC8の機能を使ってロボットと周辺設備を一括制御。設備のトータルコストダウンを実現します。
ロボットコマンド130種類のファンクションブロック(FB)により、PLCからロボットを直接制御可能です。そのためロボット側でプログラムを作成せずにPLCの知識だけで調整できるため、立上げ調整工数を削減できます。
| 項目 | 規格 | |
|---|---|---|
| ロボット名 | LPH-040A1-N15-NNN-NNNNN-3NAN(*1) | |
| アーム全長(第1アーム+第2アーム) | 200+200=400mm | |
| 動作角度およびストローク | J1(第1軸) | ±130° |
| J2(第2軸) | ±146.6° | |
| Z(第3軸) | 150mm | |
| T(第4軸) | ±360° | |
| 軸組合せ | J1(第1軸)+J2(第2軸)+Z(第3軸)+T(第4軸) | |
| 最大可搬質量 | 3kg | |
| 標準サイクルタイム(*2) | 0.45sec | |
| 合成最大速度(ツール取付面中心) | アーム先端 | 4,710mm/s |
| Z | 1,250mm/s | |
| T | 1,875deg/s | |
| 位置繰返し精度(ツール取付面中心)(*3) | J1+J2 | ±0.02mm |
| Z | 0.02mm | |
| T | ±0.01° | |
| 最大圧入力(下方向、1秒間以下) | 45N(1秒以下) | |
| 最大許容慣性モーメント(イナーシャ) | 0.075kgm2 | |
| 位置検出方式 | アブソリュートエンコーダ | |
| 駆動モータ/ブレーキ | 全軸ACサーボモータ/Z軸 ブレーキ付 | |
| ユーザ用エア配管 | 3系統(φ4×2、φ6×1) | |
| ユーザ用信号線 | 15芯(近接センサ等の信号線) | |
| エア源 | 常用圧力 | 0.05~0.35MPa |
| 許容最大圧力 | 0.6MPa | |
| 質量 | 約16kg | |