パソコン上で、デンソーロボットのプログラミング(PAC言語、PacScript)やシミュレーションを行うソフトウェア
WINCAPSⅢは、デンソーロボットの導入検討からメンテナンスまでをトータルに支援するソフトウェアです。
ロボットプログラムの作成やコントローラデータのバックアップ、3D画面でのロボット姿勢確認等、豊富な機能でデンソーロボットの運用をサポートします。
人にやさしいインターフェース・使いやすさを追求
直感的に使いやすく、洗練された操作性を実現します。
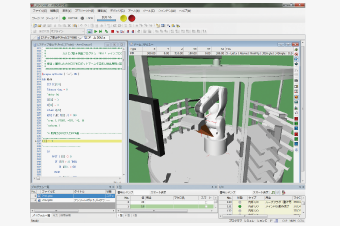
教示点や周辺設備との干渉を簡単に確認可能です。
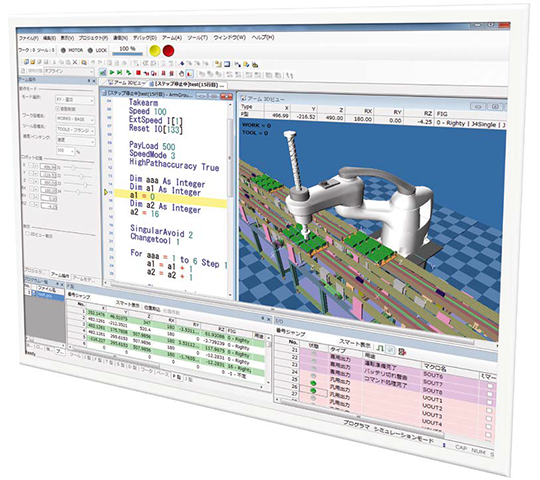
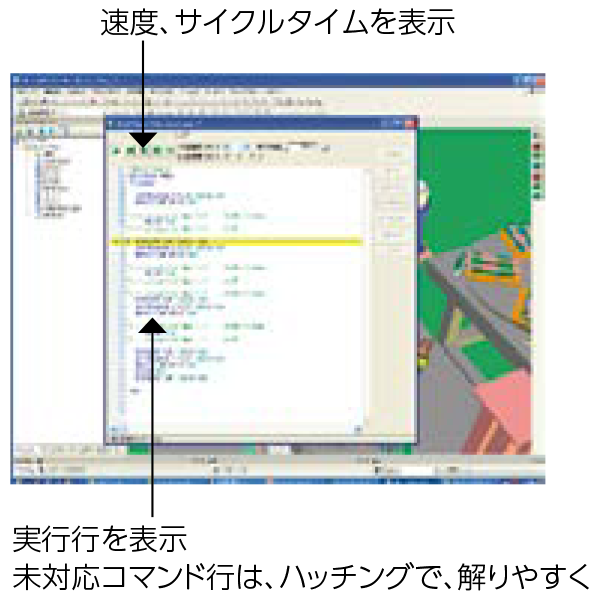
プログラム編集ウィンドウでプログラミングした内容をすぐにパソコン上でシミュレーションできます。また、プログラムのエラーチェック機能によりスペルミスなどのエラー表示ができます。
以下の機能が用意されています。
● ラインNo. の表示
● コマンドのカラー対応
● コマンド入力支援(入力候補表示)
● インデント表示
● コメントブロック
● ブックマーク
ロボットコントローラと接続し、モニタ機能やデバック機能が使用できます。
プログラムデータの送受信やログのデータ受信、保存が簡単にでき、以下の機能が使用できます。
【モニタ機能】
● 3Dビュー表示 ● 変数 ● Ⅰ/O
● プログラム実行 ● ログのデータ受信、保存
【デバッグ機能】
● ロボットの速度調節 ● 全プログラムのリセット
● 特権タスクの開始/停止 ● プログラム起動
● ステップ停止/サイクル停止/瞬時停止/プログラムリセット
● ステップ送り ● 専用入力の擬似 Ⅰ/O設定等
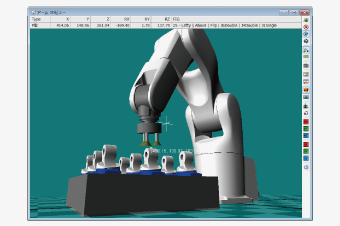
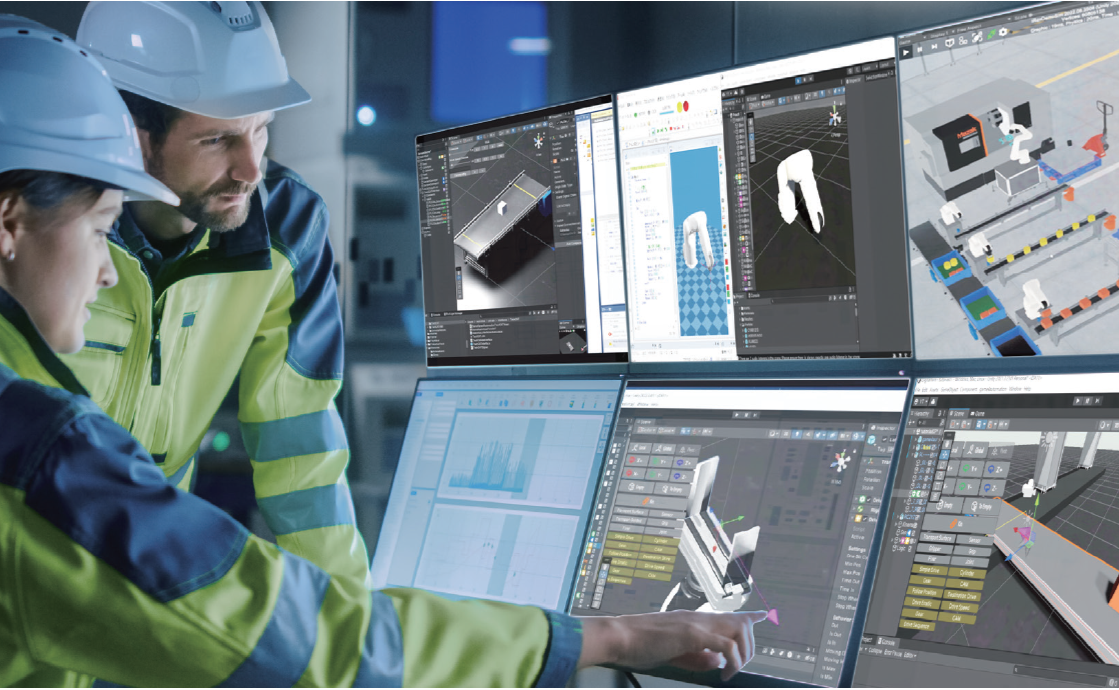
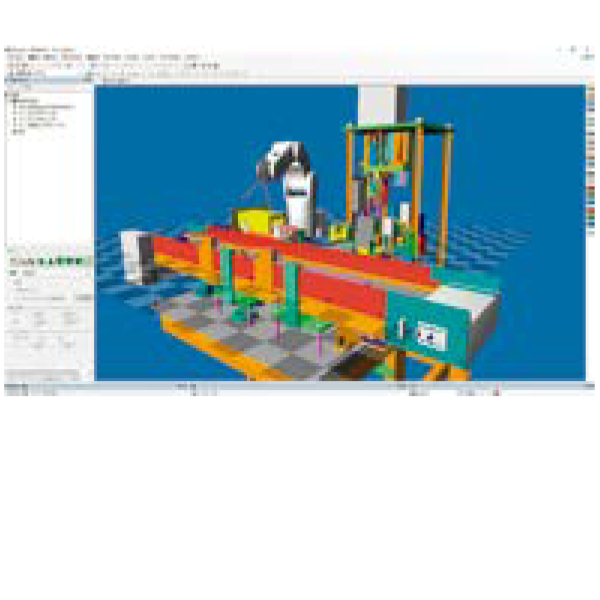
ロボットと周辺デバイスを3D画像で表示し、パソコン上でロボットの動きをシミュレーションします。
拡大縮小や視点の切り替えがマウス操作で簡単にできるため、設備とロボットを360度好きな角度から見ながらシミュレーションが行えます。
● 3Dグラフィックデータのインポート
(VRML,DirectX形式)
● オブジェクトをマウスでクリックすると、
ロボットの先端オブジェクトへ移動し、その
位置データを取得【3Dビュー教示】
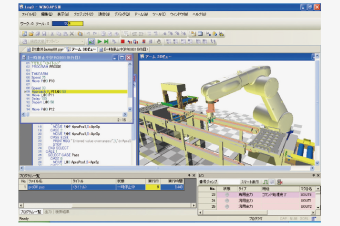
ユーザが作成したプログラムをパソコン上で実行し、サイクルタイムやロボットの動作、姿勢、干渉などをチェックできます。
実際のロボットを動かさなくてもシミュレーションできるため、効率よく安全にプログラム開発が行えます。
● プログラムの起動と停止、ブレイクポイント
● 変数、Ⅰ/Oの表示と編集
● 干渉チェック
● サイクルタイム計測
● ロボット軌跡表示
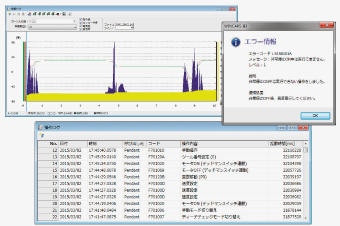
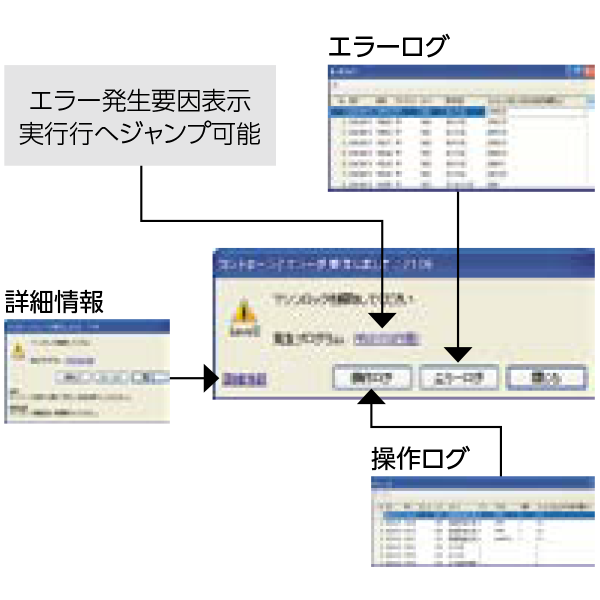
エラーログや操作ログ、トレースログなどを見ることができ、以下のログを見ることができます。
● エラーログ ● 操作ログ ● トレースログ
● 制御ログ[各軸の指令値、エンコーダ値、電流値、負荷率等]
● 変数[PRO名・変数名、型、書き込まれた値、書き込み元等]
● Ⅰ/Oログ[ポート、タイプ、状態、初期値]
● サーボ短軸データログ[速度指令値、実速度、トルク指令値、
角度偏差、電流絶対値]

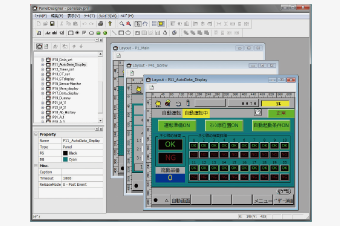
ティーチングペンダントの操作盤画面をパソコン上で作成することができます。
以下の3種の位置補正をすることができます。
■CALSET
CALSET値を補正します。モータ交換時やCALSET値の消失の場合に基準位置をもとにCALSET値を適正な値に書き換えます。
■TOOL
選択したTOOLの値を補正します。
ハンドなどのエンドエフェクタを作り変えた場合や付け替えた場合や新規に作成したときに使用します。
■WORK
選択したWORKの値を補正します。
ロボットの据付位置を変更したときに設定していたWORK座標を一度に補正できます。
設備立上げ作業時間を大幅短縮
解析作業の迅速化
3D CAD データインポート
設備干渉/教示点確認
3D CAD「 VRML」「 DirectX」 形式に対応
実機設置なしで、設備干渉、教示点を簡単確認
3Dデータをインポートし、ロボット動作のモニタリングや、手動操作で、設備干渉、教示点を簡単確認
ロボットシミュレータ
PC上でロボットプログラムをシミュレーション
豊富なロボット解析ツール
高度なモニタリング機能と充実のログ管理
バックアップデータの生成