WINCAPSⅢと併用することで、設計・導入・メンテナンスなどのシーンごとに最適なアプリケーションを提供するソフトウェアです。
シーンごとの"最適"で工数低減を実現するソフトウェア群です。
お客様が必要なソフトウェアのみお買い求めいただけます。
プログラミング初心者の方でも、アームビュー上にアイテムを配置して簡単にティーチング・操作ができるプログラミングソフトです。
複雑なプログラムの骨格作成ツールとしても活用できます。
アームビューワー上でロボットをクリックやドラッグすることで直感的に操作・ティーチングができます。
また、ロボットの軌道上にフロー制御文などのコマンドが表示されるので、どの軌道上でどの動作を行っているかが一目でわかります。
豊富なブロックプログラムの中からアプリケーションに沿ったアイテムを選択・配置していただくだけでフローチャートでプログラムが作成できます。
プログラムの全体が把握しやすく、修正箇所がわかりやすいため、プログラミング工数を低減できます。
3D Visual Programmingを使って作成したプログラムを、デンソーロボット開発言語PacScriptに変換することができます。
3D Visual Programmingで動作の骨格を作成後PacScriptに変換し、その状態で詳細を追加することで、複雑な動作のプログラムを作成することも可能です。
3D Visual Programmingではロボットの動作を視覚的に表現することが可能です。
実際にロボットに携わる生産担当者、メンテナンス担当者などの社内関係者へ設備構造を説明する際など、簡単にイメージを共有できます。
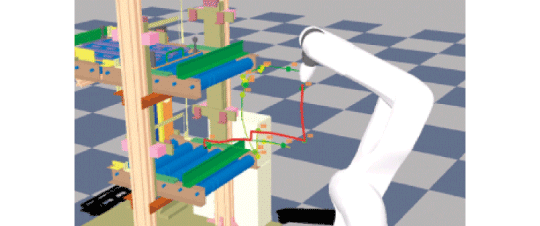
ロボット動作の開始地点・終了地点を指定すると、障害物を回避し、サイクルタイムの最も短い経路を自動生成します。
これまでユーザーの経験に頼っていたロボットの経路設計を科学的に生成できるため、熟練者でも初心者でも同じパフォーマンスでロボットを動かすことができます。
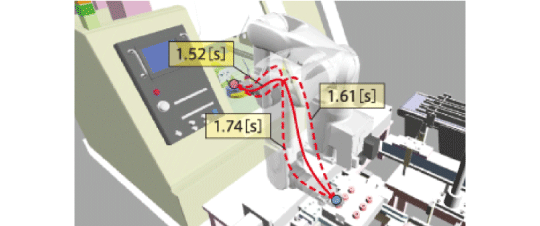
事前に周辺機器のCADデータを取り込み、開始地点と終了地点を決めて周辺機器を避けながら経路を自動生成することで、実機を使った確認作業や細かいティーチング工数が大幅に低減可能です。
周辺機器との衝突回避をしながら最短経路を導き出し、ロボットの無駄のない動きを生成することで、タクトタイム短縮に貢献します。

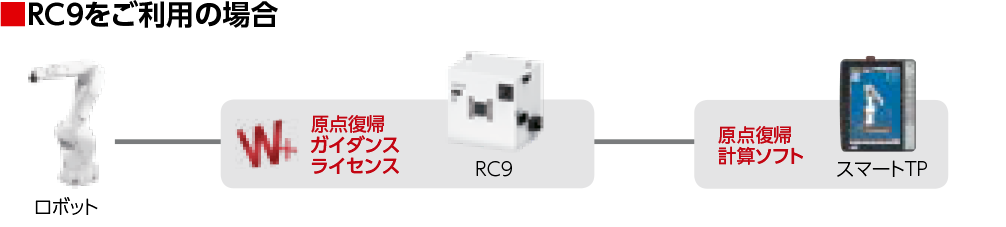
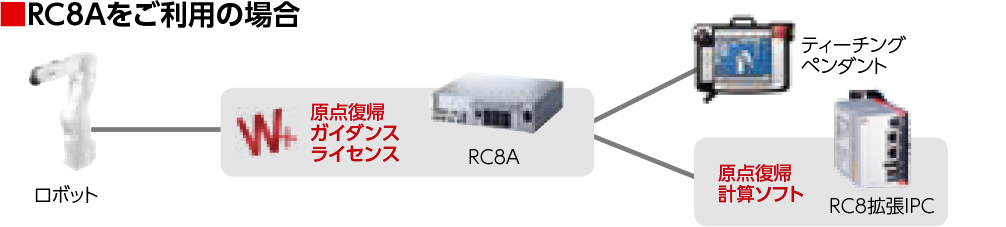
自動運転中にロボットが通った経路は、「動作の妨げになるものがなく安全である」と仮定して、自動収集した動作経路から安全に原点に戻ることができる経路を生成します。部分的な動作の逆再生も可能です。
ロボットが安全に作業原点位置に戻るための周辺機器との衝突回避を考慮した膨大なプログラム作成工数は、一切不要になります。
スマートTPでロボットを簡単に原点位置へ移動させることができるため、ロボット操作に不慣れな現場オペレーターも対応可能です。
WINCAPS Plusの各ソフトウェアで共有して使用する3Dビューワーです。
3D CADデータを簡単に取り込み、WINCAPSⅢ上にCADモデルを表示します。変換出力ロボットと周辺設備とのレイアウト検証ツールとしても活用できます。
※WINCAPSⅢと併用することで使用可能です。
STEP/IGES/VRML/X等の3D CADデータを取り込み可能 *。
VRML/STL形式でCADモデルを変換出力することもできます。
*Parasolidも順次対応予定
ロボットの周辺設備とのレイアウト検証にも活用できます。
各種モデルの構造や配置を簡単にツリーで管理。配置したモデル形状の簡易化・膨張収縮が可能ですので、簡単にレイアウト検証できます。
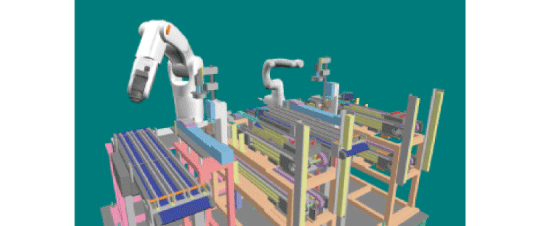
パレタイジング・デパレタイジング工程のシミュレーションから実行までを簡単に行えるソフトウェアです。
ソフトウェア上でパレットや積載物の形状・寸法を入力することで自動計算を行い、可動範囲を考慮した目標位置を表示します。
プログラミングに時間を要していたパレタイジング・デパレタイジング工程のティーチングを大幅に削減します。
高可搬ロングリーチのVMBシリーズやVLAシリーズと組み合わせることで活用シーンが広がります。
ソフトウェア上でパレットや箱の大きさを簡単に設定できます。
パレットへの最適な箱の積み方や段数や重さもシミュレーションできるので工数削減を実現します。

| パレタイジングビルダー | 最適経路計画 | ロボットビューワー | 3D Visual Programming | |
|---|---|---|---|---|
| OS | ・Windows 10/64ビット (バージョン 1803)以上 ・Windows 11/64ビット |
|||
| 画面サイズ | WXGA(1280×800)以上 | FullHD(1920 x 1080 )以上 | WXGA(1024×768)以上 | |
| CPU | 2コア 2GHz 以上 | 4コア 2GHz以上 | ||
| メモリ | 8GB 以上 | 16GB以上 | ||
| GPU | ― | 単体GPUを推奨(オンボードグラフィックスは非推奨) | ||
| 動作環境 | Microsoft .NET Framework 4.7.2 以上 | Microsoft .NET Framework 4.7 以上 | ||