Software for programming DENSO Robotics(PacScript,PAC) and creating simulations on the PC.
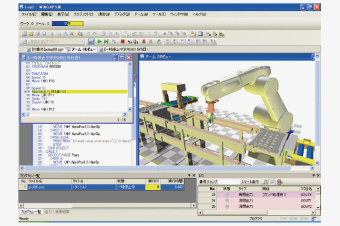
Robots can be programmed on the program
editing window. The following functions are
offered:
● Line number display
● Command color display
● Command entry support
(displaying candidates for entry)
● Indentation
● Comment block
● Bookmark
By running a program made by the user on
a PC, cycle time, robot motion, posture,
interference, etc. can be checked.
● Program start/stop, break points
● Variable, I/O display and editing
● Check for interference
● Cycle time measurement
● Robot trajectory display
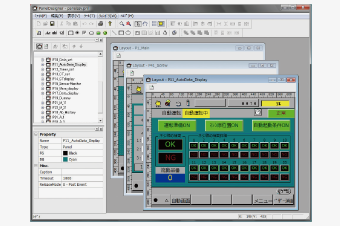
The control board screen for the teaching
pendant can be edited on a PC.
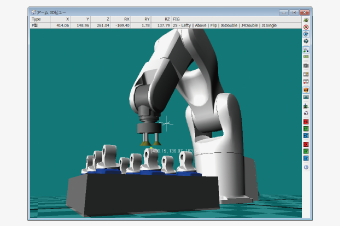
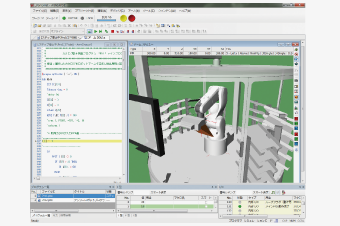
By displaying robots and peripheral devices
three-dimensionally, robot motions can be
simulated on a PC.
● 3D graphic data importing
(VRML, DirectX format)
● Clicking an object with a mouse can move
to the leading-end object of the robot
and obtain the location data.
[3D view teaching]
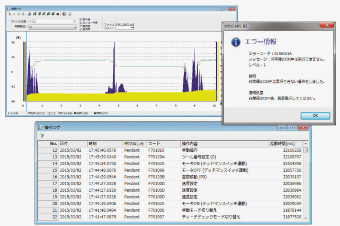
The following logs can be displayed.
● Error log
● Operation log
● Trace log
● Control log [command value, encoder
value, current value, load factor,
etc. on each axis]
● Variables [PRO name, variable name,
type, written value, write source, etc.]
● I/O log [port, type, status, initial value]
● Servo single axis data log
[speed command value, actual speed,
torque command value, angle deviation,
current absolute value]
By connecting with a robot controller,
the following functions can be used.
[Monitor function]
● 3D view display
● Variable
● I/O
● Program execution
● Log data receipt and storage
[Debugging function]
● Robot speed adjustment
● Resetting of all programs
● Start/stop of privileged tasks
● Program start
● Step stop, cycle stop, instantaneous stop,
program resetting
● Step execution
● Dummy I/O setting for
dedicated input, etc.
| Functions | Full Function Version | Light Version(*1) | Trial Version(*2) |
|---|---|---|---|
| Create new program / edit program | ○ | ○ | (*5) |
| Program bank | ○ | (*3) | (*3) |
| 3D CAD data import | ○ | - | - |
| 3D view teach | ○ | ○ | ○ |
| Simulation function | ○ | - | - |
| Debug function | ○ | - | - |
| Monitoring | ○ | (*4) | (*4) |
| Movie save function | ○ | ○ | ○ |
| ○ |
- |
- | |
| Simple calibration | ○ | ○ | ○ |






If you have not registered
The services on this member site are available only for registered customers.




































