搬送作業やパレタイジング作業に適した高可搬・ロングリーチに対応したロボットです。
最大リーチ|1,506・1,804mm
最大可搬質量|25kg

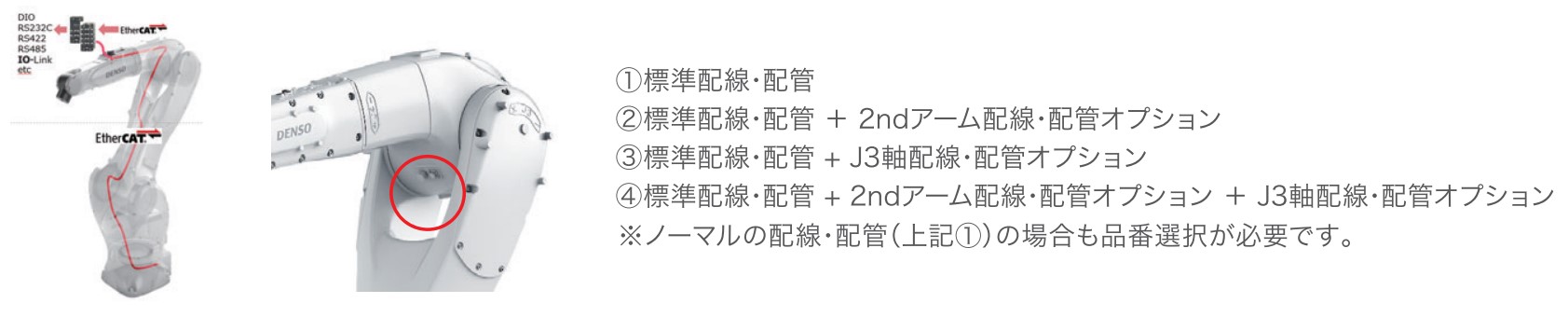
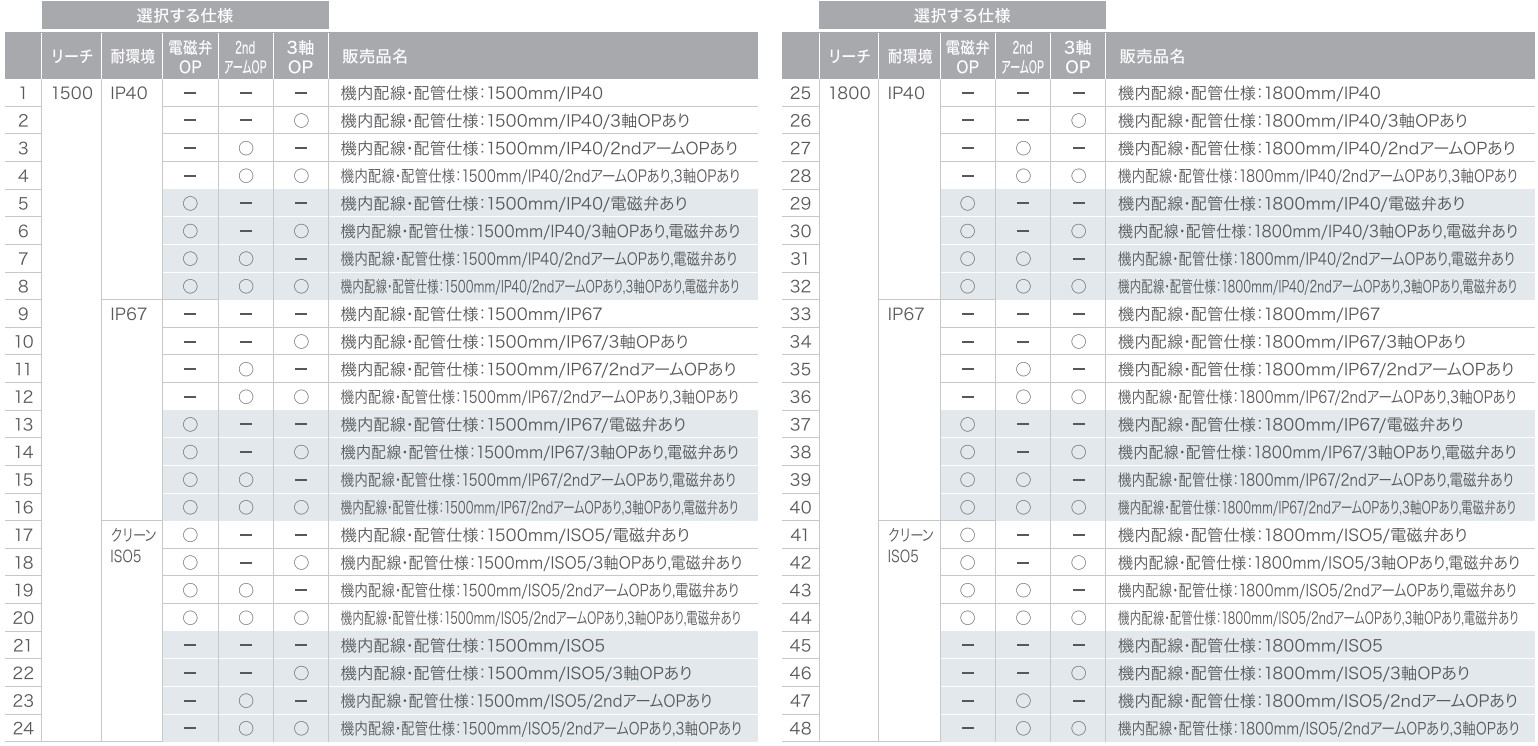
ユーザ配線・配管・電磁弁の選択オプションを充実させ、多様なデバイスやハンドをロボットフランジ部に装着可能。セカンドアームユーザ配線では、最大2本のEtherCATを機内配線可能です。また、3軸配線オプションは、外回し配線・配管の絡まりや摩耗を防ぎます。

標準仕様に加えて、防塵防滴性(IP67)、クリーン度(ISOクラス5)に準拠したラインナップを揃えています。自動車部品製造をはじめ、電気電子部品や食品、医薬品・医療機器製造工程まで、様々な業界での自動化にご活用いただけます。
※VM1500からVMB2515へ名称を変更しております。
エンコーダバックアップ電池をロボット外部に設置可能。電池の交換が容易になり、メンテナンス性が向上。

各軸のブレーキを解除するスイッチです。(このスイッチの配線は各軸のブレーキ解除信号に直結されます。)

水平調節可能
水平調節不可

| 項 目 | 単 位 | 仕 様 | ||||
|---|---|---|---|---|---|---|
| 製品名 | - | VMB-2515 | VMB-2518 | |||
| 軸数 | - | 6 | ||||
| 駆動モータ/ブレーキ | - | 全軸ACサーボモータ/全軸ブレーキ付 | ||||
| アーム全長(第1アーム+第2アーム) | mm | 1,395(710+685) | 1,695(860+835) | |||
| 最大動作領域 | mm | 1,506 (P点 : J4、J5、J6軸中心) | 1,804 (P点 : J4、J5、J6軸中心) | |||
| 動作範囲 | J1軸 | ° | -170 ~ 170*¹ | |||
| J2軸 | ° | -100 ~ 140 | ||||
| J3軸 | ° | -130 ~ 170 | ||||
| J4軸 | ° | -200 ~ 200 | ||||
| J5軸 | ° | -145 ~ 145 | ||||
| J6軸 | ° | -360 ~ 360 | ||||
| 最大可搬質量 | kg | 25 | ||||
| 最大速度 | J1軸 | deg/s | 240 | 212 | ||
| J2軸 | deg/s | 240 | 212 | |||
| J3軸 | deg/s | 300 | 270 | |||
| J4軸 | deg/s | 425 | ||||
| J5軸 | deg/s | 425 | ||||
| J6軸 | deg/s | 887 | ||||
| 位置繰り返し精度(ツール取付面中心)*² | mm | ±0.05 | ||||
| 最大許容モーメント | J4軸まわり | N・m | 52 | |||
| J5軸まわり | N・m | 52 | ||||
| J6軸まわり | N・m | 32 | ||||
| エア配管 | セカンドアーム部 | オプション無し | - | 2系統(Φ8×2) | ||
| オプション有り | - | 1系統(φ8 ×1) 電磁弁専用8系統(φ6×8) [電磁弁はa,b,cの組合選択式] a. 2ポジションダブルソレノイド b. 3ポジションエキゾーストセンター c. 3ポジションクローズドセンター |
||||
| J3軸部 | オプション無し | - | 0系統 | |||
| オプション有り | - | 1系統(φ8 ×1) | ||||
| 信号線、Ethernet | セカンドアーム部 | オプション無し | - | 信号線:15芯 Ethernetケーブル:1本 |
||
| オプション有り | - | 信号線:15芯+10芯*³ Ethernetケーブル:1本+1本 |
||||
| J3軸部 | オプション無し | - | 0芯 | |||
| オプション有り | - | 10芯 | ||||
| エア源 | 常用圧力 | MPa | 0.20~0.39 | |||
| 許容最大圧力 | MPa | 0.49 | ||||
| 騒音(等価騒音レベル[A特性]) | dB | 75 | ||||
| 保護等級 | - | 標準タイプ:IP40 耐悪環境タイプ:IP67 |
||||
| クリーン度(ISO 14644-1) | - | Class 5(クリーンタイプ) | ||||
| 汚損度*⁴ | - | 標準タイプ: 2*⁵ 耐悪環境タイプ: 3 クリーンタイプ: 2 |
||||
| 本体質量 | kg | 約230 | 約250 | |||