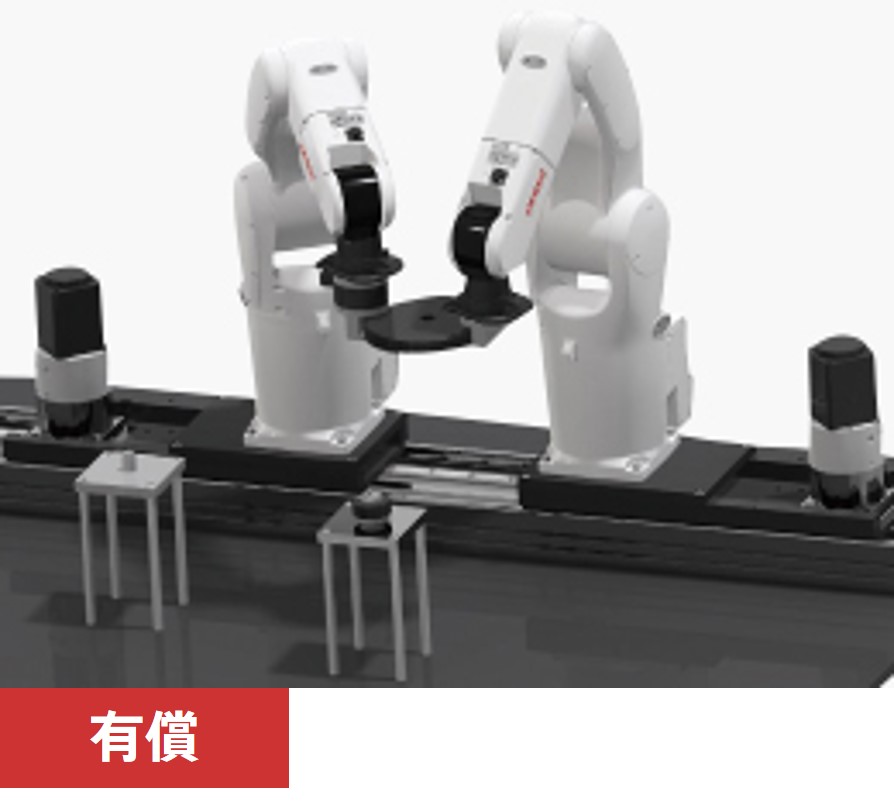
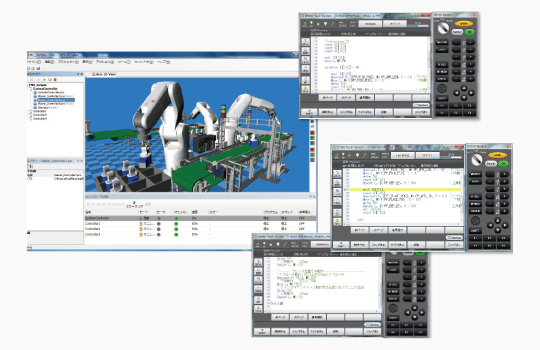
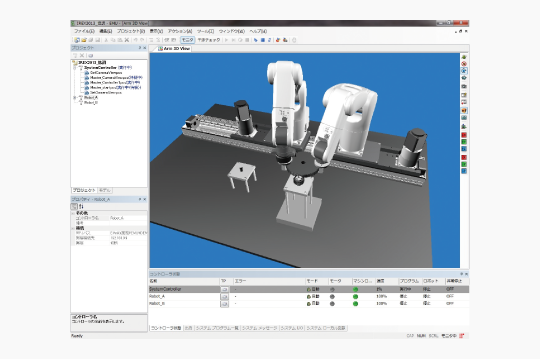
複数台のデンソーロボットのシュミレーションを可能とするソフトウェア
● WINCAPS®Ⅲで作成したプロジェクトを活用し、周辺機器(モデル)との連携や、バーチャルとリアルの混在状態での動作検証が可能です。
● デンソーロボットを主体とした設備において、設計段階での事前検証・生産システムの垂直立上を支援します。
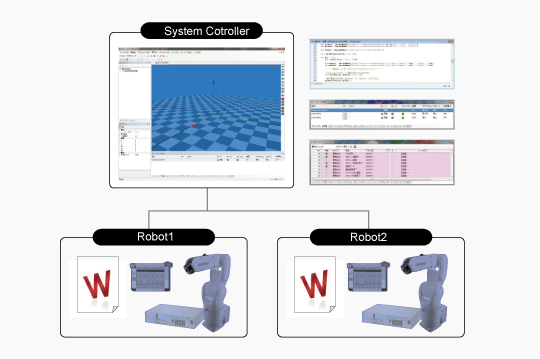
システムコントローラのプログラムから、各ロボットを起動したり変数やI/Oを操作することで、設備全体の動作シーケンスを制御できます。また、複数台のデンソーロボットを使用した協調動作の検証が可能です。
実機と接続することで、実機から取得したロボットの現在位置情報を3Dビューウインドウ上に表示できるため、バーチャルとリアルが混在した状態での動作検証も可能です。
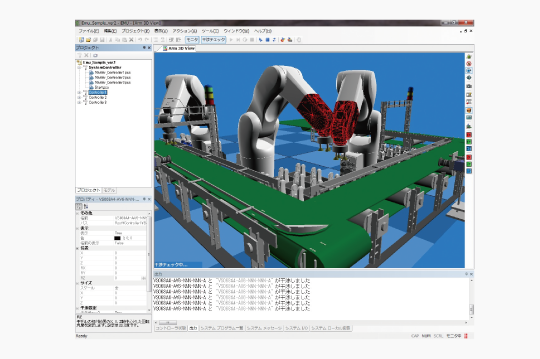
装置間の干渉チェックや動作シーケンスを事前に検証することで、設計の初期段階での完成度を高めることができ、開発期間の短縮とコスト削減に貢献します。
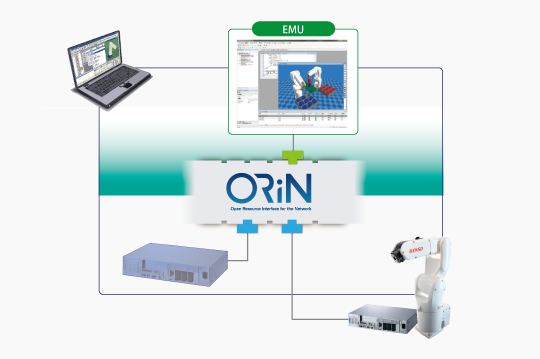
ワーク搬送コンベア、ローダなどの周辺装置とロボットを連動させた設備全体の動作を、実機を使わずに検証することが可能です。
【OS】 Windows® 10 / 11
【PC】 CPU マルチコアプロセッサ2GHz、 メモリ 2GB、 HDD 1GB以上