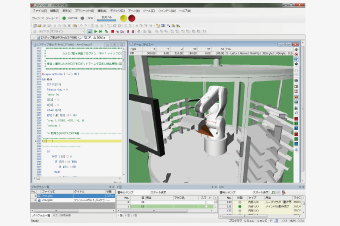
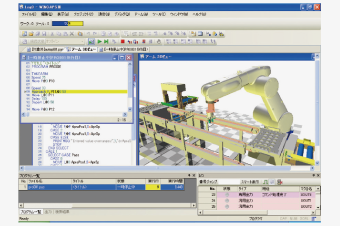
프로그램상에서 덴소 로봇의 프로그래밍(PAC 언어, PacScript)이나 시뮬레이션을 실행하는 소프트웨어
프로그램 편집 윈도우에서 프로그래밍 작업을 합니다.
아래 기능을 갖추었습니다.
•라인 No. 표시
•커맨드 컬러 대응
•커맨드 입력 지원(입력 후보 표시)
•들여쓰기 표시
•코멘트 블록
•즐겨찾기
사용자가 작성한 프로그램을 PC상에서 실행하고 사이클 타임 및 로봇 동작, 자세, 간섭 등을 체크할 수 있습니다.
•프로그램 기동과 정지, 브레이크 포인트
•변수, I/O 표시와 편집
•간섭 체크
•사이클 타임 계측
•로봇 궤적 표시
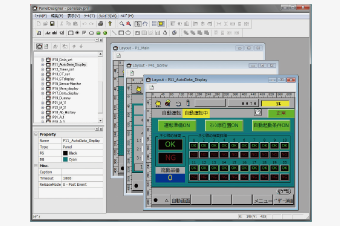
티칭 펜던트 조작판 화면을 PC상에서 작성할 수 있습니다.
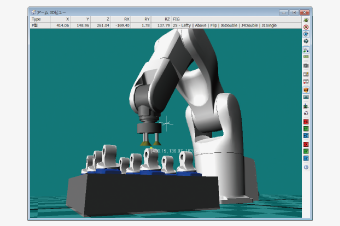
로봇과 주변 디바이스를 3D 화상으로 표시하여 PC상에서 동작을 시뮬레이션합니다.
•3D 그래픽 데이터의 인포트
(VRML, Direct 형식)
•객체를 마우스로 클릭하면 로봇의 선단 객체로 이동하여 그 위치 데이터를 수집【3D 뷰 교시】
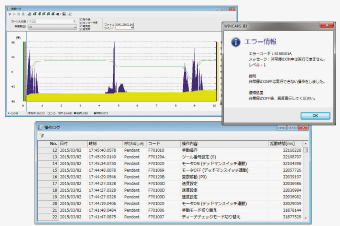
아래 로그를 볼 수 있습니다.
•에러 로그
•조작 로그
•트레이스 로그
•제어 로그 〔각 축의 지령값, 인코더값, 전류값, 부하율 등〕
•변수〔PRO명·변수명, 형, 입력값, 입력 장소 등〕
•I/O 로그 〔포트, 타입, 상태, 초기값〕
•서보 단축(短軸) 데이터 로그 〔속도 지령값, 실속도, 토크 지령값, 각도 편차, 전류 절대값〕
로봇 컨트롤러와 접속하여 아래 기능을 사용할 수 있습니다.
【모니터링 기능】
•3D 뷰 표시
•변수
•I/O
•프로그램 실행
•로그 데이터 수신, 저장
•【디버그 기능】
•로봇 속도 조절
•전 프로그램 초기화
•특권 태스크의 개시/정지
•프로그램 기동
•스텝 정지/사이클 정지/순간 정지/프로그램 초기화
•스텝 보내기
•전용 입력 의사(pseudo) I/O 설정 등
| 기능 | 제품판 | Light판(*1) | 시험판(*2) |
|---|---|---|---|
| 프로그램 신규작성 및 편집 | ○ | ○ | (*5) |
| 프로그램 뱅크 | ○ | (*3) | (*3) |
| 3D 기능 | ○ | - | - |
| 3D 뷰 교시 | ○ | ○ | ○ |
| 시뮬레이션 기능 | ○ | - | - |
| 디버그 기능 | ○ | - | - |
| 모니터링 | ○ | (*4) | (*4) |
| 동영상 저장 기능 | ○ | ○ | ○ |
| 인쇄 | ○ |
- |
- |
| 간이 위치 보정 | ○ | ○ | ○ |





덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)