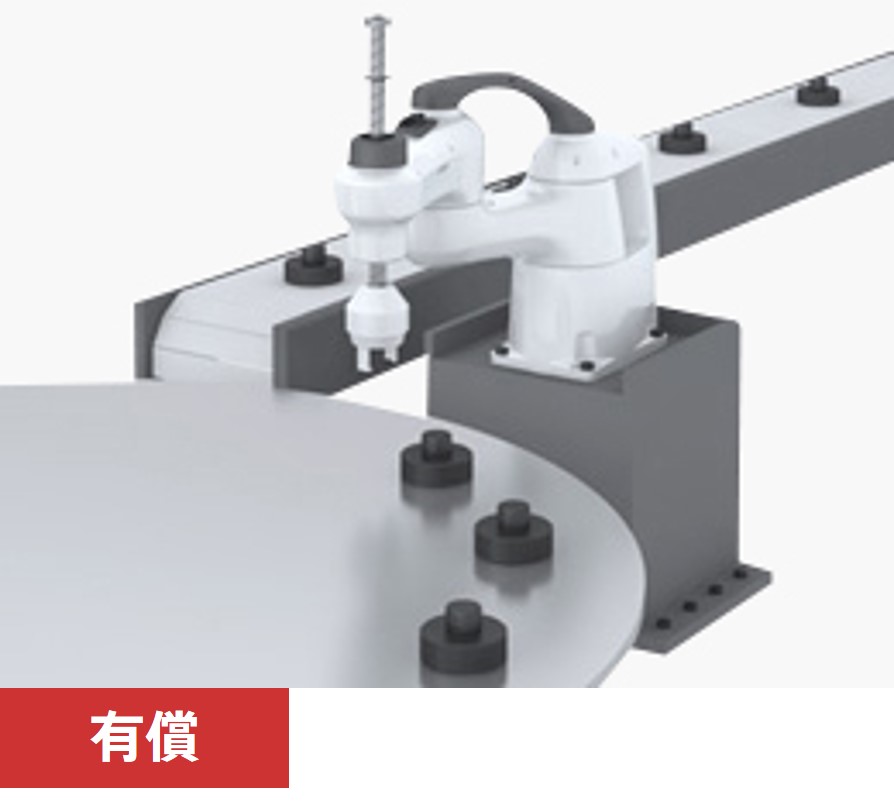
センサトラッキング
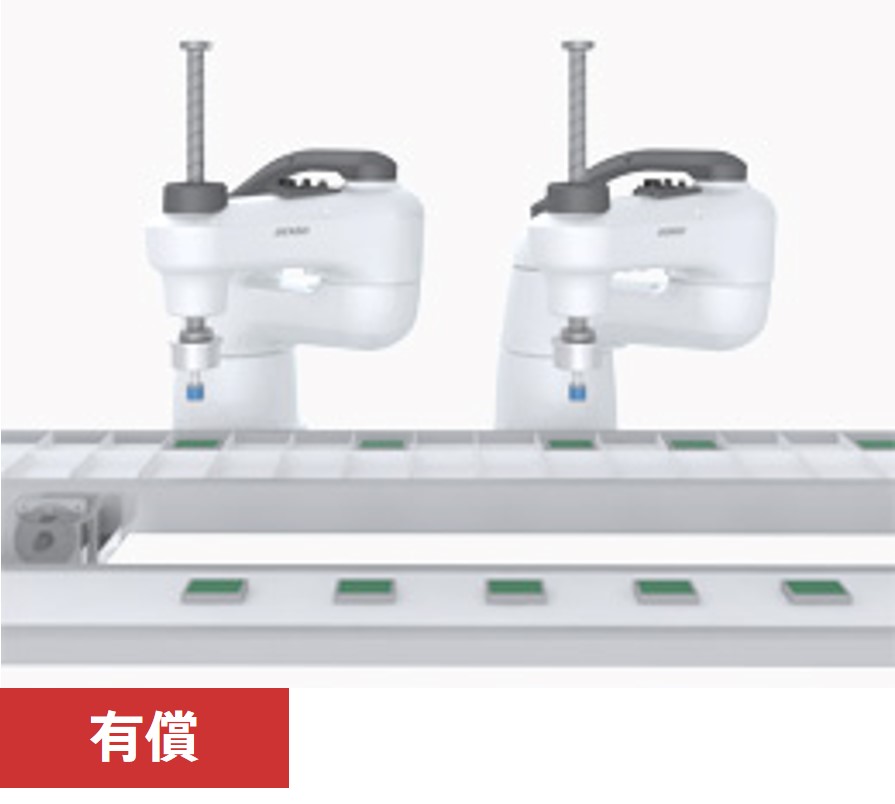
任意の間隔で一直線に並んで運ばれてくるワークをピックアップするような場合に使用します。 光電センサの前をワークが横切った際、信号をトリガにする方式です。 光電センサの前をワークが横切った際、ワークの位置を事前に登録し、トリガが入る度にそのワークがどこに流れてくるかを逐次計算してロボットに追従させます。
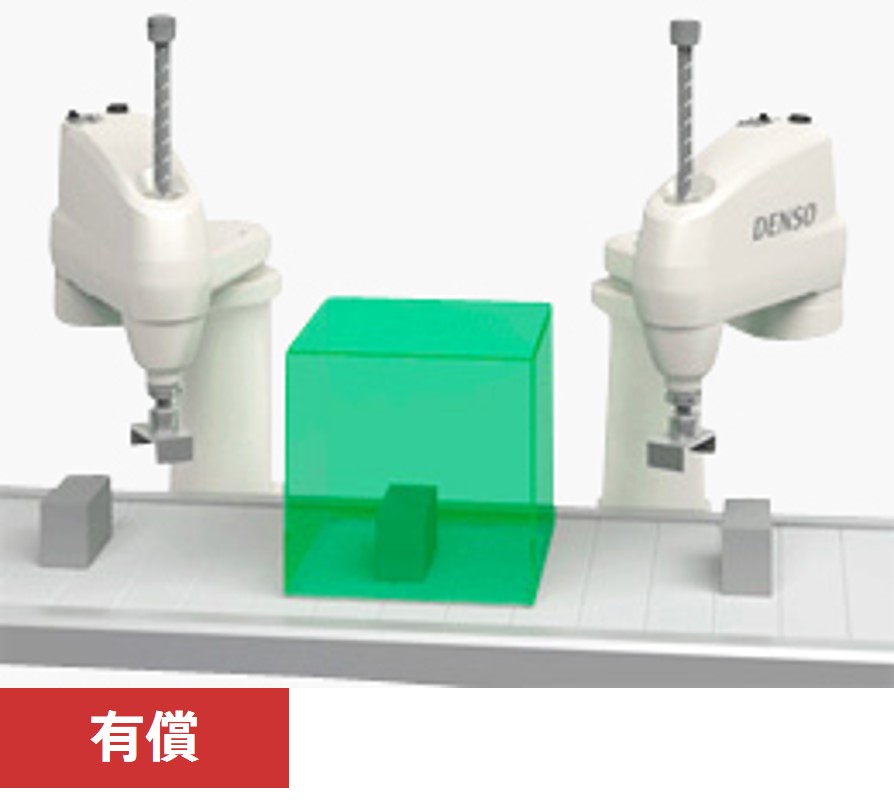
ビジョントラッキング
任意の位置・姿勢で置かれて運ばれてくるワークをピックアップする場合に使用します。
ビジョンセンサが画像認識でワークを検出した際、信号をトリガにする方式です。
トリガが入る度に画像認識で検出したワークの位置・姿勢を登録し、そのワークがどこに流れてくるかを逐次計算してロボットに追従させます。
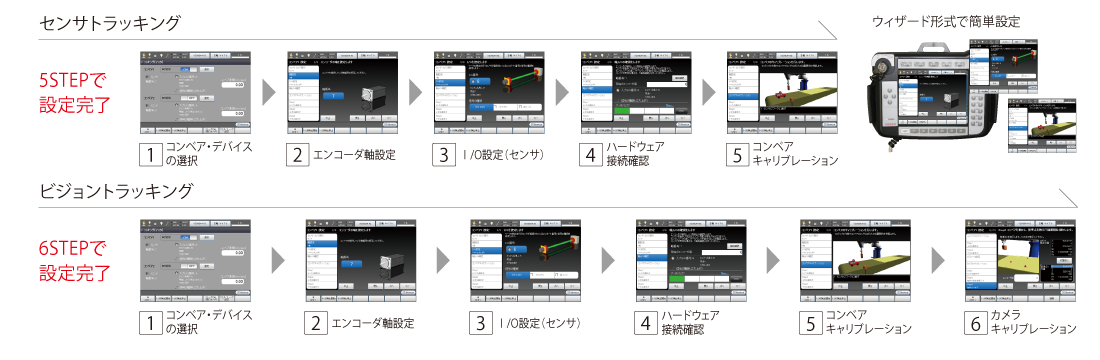
設定方法
煩雑なコンベアトラッキングの調整をウィザード形式のGUIで簡単に調整が可能です。
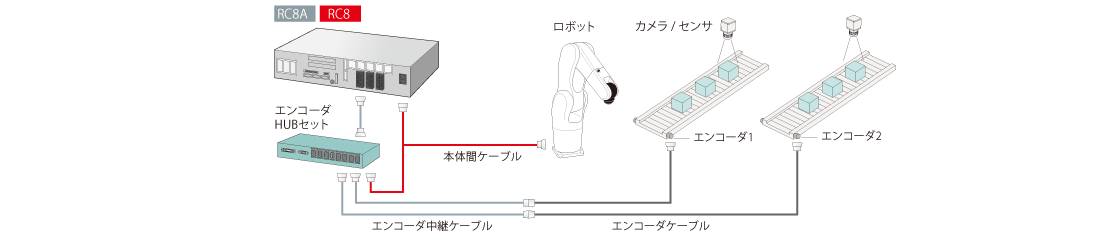
システム構成