High-performance, low-priced, compact and light weight SCARA Robot!
Maximum arm reach|400mm
Maximum payload|3kg
Position repeatability|±0.02mm
Easy Setting of Image Processing Operations without Programming
EVP2 is an image processing application specially developed for use with a “pick & place” robot.
This software offers enhanced functionality and several times greater processing power than the previous EVP application, while maintaining the same ease of operation.
>Click here for EVP2 product page>Click here to download the EVP2 catalog
The maximum moment of inertia of the T-axis is large in order to provide a gripper design with a high degree of freedom.
* Also supports use in other configurations including in an overhanging position.
The robot and surrounding equipment can be controlled together according to the purpose through use of the high-performance controller RC8 function. This feature realizes a total cost down for equipment.
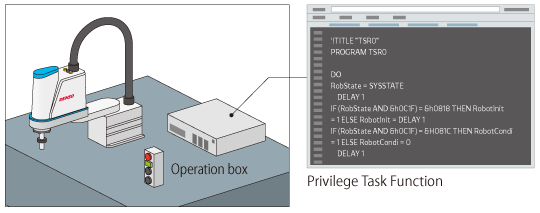
Utilizing the command-slave function provided as a free option enables the direct control of the robot from PLC through the Function Block (FB) feature that supports 130 types of robot commands that can be openly programmed from PLC.
This feature allows adjustments to be performed with only PLC knowledge without needing to create programs on the robot side, to realize a reduction in work time for initial adjustments at the start of use.
| Term | Specifications | |
|---|---|---|
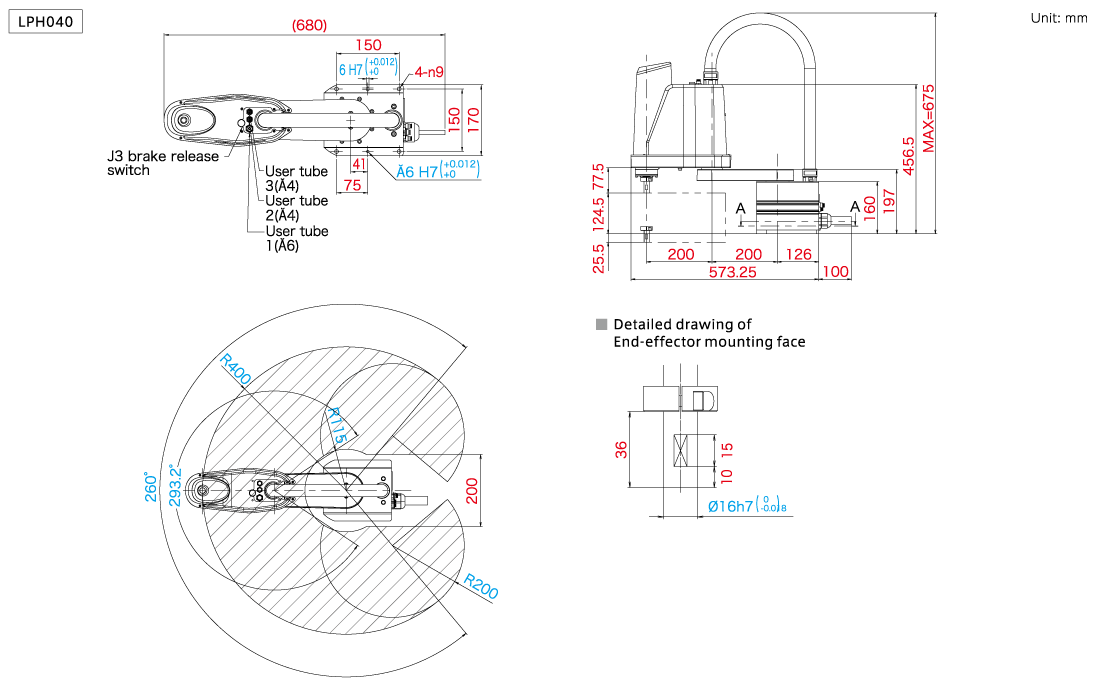
| Model name of robot unit | LPH040A1(*1) | |
| Overall arm length(first arm + second arm) | 200+200=400mm | |
| Motion angle and stroke | J1(1st-Axis) | ±130° |
| J2(2nd-Axis) | ±146.6° | |
| Z(3rd-Axis) | 150mm | |
| T(4th-Axis) | ±360° | |
| Axis combination | J1(1st-Axis)+J2(2nd-Axis)+Z(3rd-Axis)+T(4th-Axis) | |
| Maximum payload | 3kg | |
| Cycle time (*2) | 0.45sec | |
| Maximum composite speed (at the center of an end-effector mounting face) |
At the center of the hand mounting flange | 4,710mm/s |
| Z | 1,250mm/s | |
| T | 1,875deg/s | |
| Position repeatability (at the center of an end-effector mounting face) (*3) |
J1+J2 | ±0.02mm |
| Z | 0.02mm | |
| T | ±0.01° | |
| Maximum force-fit (downward, for up to 1 sec) | 45N | |
| Maximum allowable moment of inertia | 0.075kgm2 | |
| Position detection | Absolute encoder | |
| Drive motor and brake | AC servomotors for all joints / Brakes for Z axis | |
| User air pipe | 3 systems (φ4×2, φ6×1) | |
| User signal line | 15 (for proximity sensor signals, etc.) | |
| Air source | Operating pressure | 0.05~0.35MPa |
| Max. allowable pressure | 0.6MPa | |
| Weight | Approx. 16kg | |
If you have not registered
The services on this member site are available only for registered customers.