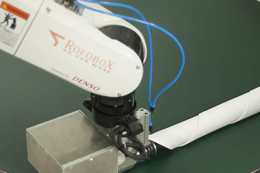
速く動き始める。速く動き続ける。正確に止まる。
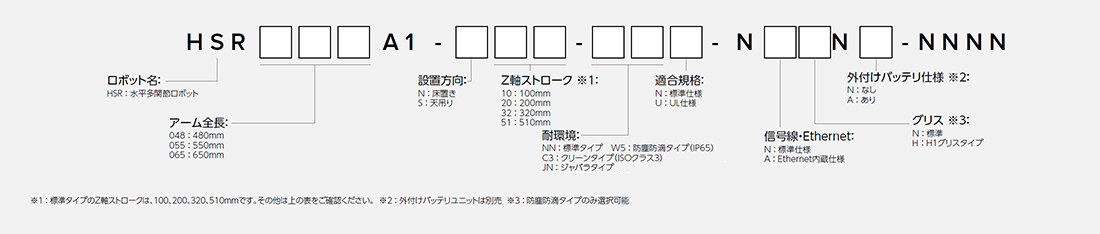
アーム長|480・550・650mm
Z軸ストローク|100・200・320・510mm
最大可搬質量|8kg
標準サイクルタイム|0.28・0.31秒
ロボットの性能は、カタログ値で読みきれないことがあります。サイクルタイム内に収まるのか、本当に動かし続けられるのか、判断できないときがあります。そうした課題を解決するために、「速く動き始める」「速く動き続ける」「正確に止まる」という現場が求め続けていたこの基本性能を極限まで追求し「本物の高速性」を実現したのが新型高速スカラロボット、HSR シリーズです。
高速性を追求した結果、従来の部品組立てから食品・医薬品・化粧品等のパッケージング工程においても小型・省スペースに高速ピッキングシステムを実現、現場に革新を起こします。

クラス最高レベルの高速動作を実現。CPM (Cycle Per Minute=1 分間の仕事量)の向上により、高速かつ長時間の動作が可能。

長時間の連続稼働を実現。
ベース部の放熱性の向上により、実工程で求められる長時間の連続稼働を実現。
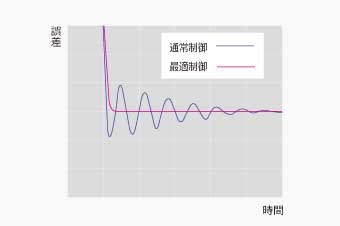
アームの状態を動的に制御に反映することによってロボットを短時間で制振。高速搬送時の振動や残留振動を抑え、サイクルタイムを短縮。
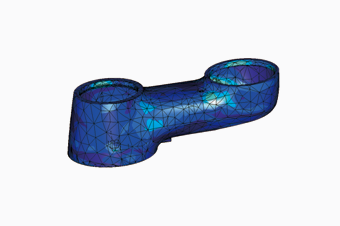
設計、高剛性・軽量アーム。
高剛性と軽量化の両立により、高可搬(8kg)と高速動作を実現。

シャフトの反転で設置方向をシフト可。床置きタイプ、天吊りタイプを選択可能。(※取付タイプの変更の場合は、お問い合わせください。)

大容量モータをベースユニットへ統合し、アーム先端の軽量化とアーム構造の最適化により、高速性を向上。



| HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | ||
|---|---|---|---|---|
| アーム全長 | 205 (J1:第1アーム)+275 (J2:第2アーム)=480mm | 275 (J1:第1アーム)+275 (J2:第2アーム)=550mm | 375 (J1:第1アーム)+275 (J2:第2アーム)=650mm | |
| 動作角度 および ストローク | J1(第1軸) | ±130° | ||
| J2(第2軸) | ±143.5° | ±150° | ||
| Z(第3軸)(*) | *=10:100mm *=20:200mm *=32:320mm *=51:510mm |
*=10:100mm *=20:200mm *=32:320mm *=51:510mm |
*=10:100mm *=20:200mm *=32:320mm *=51:510mm |
|
| T(第4軸) | ±360° | |||
| 軸組合せ | J1 (第1軸)+J2 (第2軸)+Z (第3軸)+T (第4軸) | |||
| 最大可搬質量 | 8kg | |||
| 合成最大速度 | アーム先端 | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z(第3軸) | 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2,475mm/s 510mm:2,475mm/s |
100mm:1,700mm/s 200mm:2,300mm/s 320mm:2,475mm/s 510mm:2,475mm/s |
100mm:1,700mm/s 200mm:2,300mm/s 320mm:2.475mm/s 510mm:2,475mm/s |
|
| T(第4軸) | 2,500°/s | |||
| 位置繰返し精度 (周囲温度一定) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| 最大圧入力 (下方向) | 98N (1秒間以下) | |||
| 最大許容慣性モーメント | 0.12kgm2 | |||
| 位置検出方式 | アブソリュートエンコーダ | |||
| 駆動モータ、ブレーキ | 全軸ACサーボモータ Z軸、T軸:ブレーキ付 | |||
| ブレーキ解除操作 |
|
|||
| ユーザ用エアー配管 | 4系統 (φ4×2、φ6×2) | |||
| ユーザ用信号線 | ・19芯 (近接センサー等の信号線) ・Ethernet(8) *¹ |
|||
| エアー源 | 常用圧力 | 0.05~0.35MPa | ||
| 許容最大圧力 | 0.59MPa | |||
| 空気伝播騒音 (A加重等価持続音圧レベル) |
80dB以下 | |||
| 保護等級 | IP20 | |||
| 質 量 *² | 約31 kg (約68.4 lb) | 約31.5 kg (約69.5 lb) | 約32 kg (約70.6 lb) | |
| HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | ||
|---|---|---|---|---|
| アーム全長 | 205 (J1:第1アーム)+275 (J2:第2アーム)=480mm | 275 (J1:第1アーム) +275 (J2:第2アーム) =550mm | 375 (J1:第1アーム) +275 (J2:第2アーム) =650mm | |
| 動作角度およびストローク | J1(第1軸) | ±130° | ||
| J2(第2軸) | ±143.5° | ±150° | ||
| Z(第3軸)(*) | *=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
|
| T(第4軸) | ±360° | |||
| 軸組合せ | J1 (第1軸)+J2 (第2軸)+Z (第3軸)+T (第4軸) | |||
| 最大可搬質量 | 8kg | |||
| 合成最大速度 | アーム先端 | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z(第3軸) | 170mm:2,250mm/s 290mm:2,475mm/s 450mm:2,475mm/s |
170mm:2,250mm/s 290mm:2,475mm/s 450mm:2,475mm/s |
170mm:2,250mm/s 290mm:2,475mm/s 450mm:2,475mm/s |
|
| T(第4軸) | 2,500°/s | |||
| 位置繰返し精度(周囲温度一定) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| 最大圧入力(下方向) | 98N (1秒間以下) | |||
| 最大許容慣性モーメント | 0.12kgm2 | |||
| 位置検出方式 | アブソリュートエンコーダ | |||
| 駆動モータ、ブレーキ | 全軸ACサーボモータ Z軸、T軸:ブレーキ付 | |||
| ブレーキ解除操作 |
|
|||
| ユーザ用エアー配管 | 4系統 (φ4×2、φ6×2) | |||
| ユーザ用信号線 | ・19芯 (近接センサー等の信号線) ・Ethernet(8) *¹ |
|||
| エアー源 | 常用圧力 | 0.05~0.35MPa | ||
| 許容最大圧力 | 0.59MPa | |||
| 空気伝播騒音 (A加重等価持続音圧レベル) |
80dB以下 | |||
| 保護等級 | IP20 | |||
| 質 量 *² | 約31 kg (約68.4 lb) | 約31.5 kg (約69.5 lb) | 約32 kg (約70.6 lb) | |
| HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | ||
|---|---|---|---|---|
| アーム全長 | 205 (J1:第1アーム)+275 (J2:第2アーム)=480mm | 275 (J1:第1アーム) +275 (J2:第2アーム) =550mm | 375 (J1:第1アーム) +275 (J2:第2アーム) =650mm | |
| 動作角度およびストローク | J1(第1軸) | ±130° | ||
| J2(第2軸) | ±143.5° | ±150° | ||
| Z(第3軸)(*) | *=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
|
| T(第4軸) | ±360° | |||
| 軸組合せ | J1 (第1軸)+J2 (第2軸)+Z (第3軸)+T (第4軸) | |||
| 最大可搬質量 | 8kg | |||
| 合成最大速度 | アーム先端 | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z(第3軸) | 170mm:2,250mm/s 290mm:2,475mm/s 450mm:2,475mm/s |
170mm:2,250mm/s 290mm:2,475mm/s 450mm:2,475mm/s |
170mm:2,250mm/s 290mm:2,475mm/s 450mm:2,475mm/s |
|
| T(第4軸) | 2,500°/s | |||
| 位置繰返し精度(周囲温度一定) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| 最大圧入力(下方向) | 98N (1秒間以下) | |||
| 最大許容慣性モーメント | 0.12kgm2 | |||
| 位置検出方式 | アブソリュートエンコーダ | |||
| 駆動モータ、ブレーキ | 全軸ACサーボモータ Z軸、T軸:ブレーキ付 | |||
| ブレーキ解除操作 |
|
|||
| ユーザ用エアー配管 | 4系統 (φ4×2、φ6×2) | |||
| ユーザ用信号線 | ・19芯 (近接センサー等の信号線) ・Ethernet(8) *¹ |
|||
| エアー源 | 常用圧力 | 0.05~0.35MPa | ||
| 許容最大圧力 | 0.59MPa | |||
| 空気伝播騒音 (A加重等価持続音圧レベル) |
80dB以下 | |||
| 保護等級 | IP65 | |||
| 質 量 *² | 約31 kg (約68.4 lb) | 約31.5 kg (約69.5 lb) | 約32 kg (約70.6 lb) | |
| HSR048A1-N* | HSR055A1-N* | HSR065A1-N* | ||
|---|---|---|---|---|
| アーム全長 | 205 (J1:第1アーム)+275 (J2:第2アーム)=480mm | 275 (J1:第1アーム) +275 (J2:第2アーム) =550mm | 375 (J1:第1アーム) +275 (J2:第2アーム) =650mm | |
| 動作角度およびストローク | J1(第1軸) | ±130° | ||
| J2(第2軸) | ±143.5° | ±150° | ||
| Z(第3軸)(*) | *=17:170mm *=29:290mm |
*=17:170mm *=29:290mm |
*=17:170mm *=29:290mm |
|
| T(第4軸) | ±360° | |||
| 軸組合せ | J1 (第1軸)+J2 (第2軸)+Z (第3軸)+T (第4軸) | |||
| 最大可搬質量 | 8kg | |||
| 合成最大速度 | アーム先端 | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z(第3軸) | 170mm:2,250mm/s 290mm:2,475mm/s |
170mm:2,250mm/s 290mm:2,475mm/s |
170mm:2,250mm/s 290mm:2,475mm/s |
|
| T(第4軸) | 2,500°/s | |||
| 位置繰返し精度(周囲温度一定) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| 最大圧入力(下方向) | 98N (1秒間以下) | |||
| 最大許容慣性モーメント | 0.12kgm2 | |||
| 位置検出方式 | アブソリュートエンコーダ | |||
| 駆動モータ、ブレーキ | 全軸ACサーボモータ Z軸、T軸:ブレーキ付 | |||
| ブレーキ解除操作 |
|
|||
| ユーザ用エアー配管 | 4系統 (φ4×2、φ6×2) | |||
| ユーザ用信号線 | ・19芯 (近接センサー等の信号線) ・Ethernet(8) *¹ |
|||
| エアー源 | 常用圧力 | 0.05~0.35MPa | ||
| 許容最大圧力 | 0.59MPa | |||
| 空気伝播騒音 (A加重等価持続音圧レベル) |
80dB以下 | |||
| クリーン度 (14644-1) | ISO 3(Use Point) | |||
| 質 量 *² | 約31 kg (約68.4 lb) | 約31.5 kg (約69.5 lb) | 約32 kg (約70.6 lb) | |
| HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | ||
|---|---|---|---|---|
| アーム全長 | 205 (J1:第1アーム)+275 (J2:第2アーム)=480mm | 275 (J1:第1アーム) +275 (J2:第2アーム) =550mm | 375 (J1:第1アーム) +275 (J2:第2アーム) =650mm | |
| 動作角度およびストローク | J1(第1軸) | ±130° | ||
| J2(第2軸) | ±143.5° | ±150° | ||
| Z(第3軸)(*) | *=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
|
| T(第4軸) | ±360° | |||
| 軸組合せ | J1 (第1軸)+J2 (第2軸)+Z (第3軸)+T (第4軸) | |||
| 最大可搬質量 | 8kg | |||
| 合成最大速度 | アーム先端 | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z(第3軸) | 170mm:2,250mm/s 290mm:2,350mm/s 450mm:2,350mm/s |
170mm:2,250mm/s 290mm:2,350mm/s 450mm:2,350mm/s |
170mm:2,250mm/s 290mm:2,350mm/s 450mm:2,350mm/s |
|
| T(第4軸) | 2,500°/s | |||
| 位置繰返し精度(周囲温度一定) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| 最大圧入力(下方向) | 98N (1秒間以下) | |||
| 最大許容慣性モーメント | 0.12kgm2 | |||
| 位置検出方式 | アブソリュートエンコーダ | |||
| 駆動モータ、ブレーキ | 全軸ACサーボモータ Z軸、T軸:ブレーキ付 | |||
| ブレーキ解除操作 |
|
|||
| ユーザ用エアー配管 | 4系統 (φ4×2、φ6×2) | |||
| ユーザ用信号線 | ・19芯 (近接センサー等の信号線) ・Ethernet(8) *¹ |
|||
| エアー源 | 常用圧力 | 0.05~0.35MPa | ||
| 許容最大圧力 | 0.59MPa | |||
| 空気伝播騒音 (A加重等価持続音圧レベル) |
80dB以下 | |||
| 保護等級 | IP65 | |||
| 質 量 *² | 約31 kg (約68.4 lb) | 約31.5 kg (約69.5 lb) | 約32 kg (約70.6 lb) | |
| 分 類 | 品 名 | 数 量 |
|---|---|---|
| ロボット&付属品 | ロボット本体 | 1台 |
| 本体間ケーブル(オプション品) | 1本 | |
| 方向指示ラベル | 1枚 | |
| 位置決めピン(めねじ付位置決めピン&ダイヤピン) | 1セット | |
| ハンド制御信号用コネクタセット (CN20、CN21用) | 1セット | |
| コントローラ&付属品 | ロボットコントローラ | 1台 |
| 電源ケーブル(5m) | 1本 | |
| ペンダントレス用ダミーコネクタ (UL仕様は除く) | 1個 | |
| ケーブルクランプ | 1個 | |
| ソフトウェア他 | WINCAPSIII Trial インストールディスク | 1枚 |
| 取扱説明書(マニュアルパックディスク) | 1セット | |
| 安全にご使用いただくために | 1冊 | |
| 警告ラベル | 1枚 |
| 分 類 | 品 名 | ||
|---|---|---|---|
| I/Oケーブル | 標準I/O ケーブルセット | Mini I/Oケーブル(8 m)と HAND I/Oケーブル(8 m)のセット |
|
| Mini I/Oケーブル(15 m)と HAND I/Oケーブル(15 m)のセット |
|||
| Mini I/O ケーブル(68ピン) | 8 m | ||
| 15 m | |||
| HAND I/O ケーブル(20ピン) | 8 m | ||
| 15 m | |||
| パラレルI/O用ケーブル(96ピン) | 8 m | ||
| 15m | |||
| 操作用機器 | 多機能ティーチングペンダント | ケーブル長:4 m | |
| ケーブル長:8 m | |||
| ケーブル長:12 m | |||
| ミニペンダントキット (WINCAPSIII Lightを含む) |
ケーブル長:4 m | 日本語表記 | |
| 英語表記 | |||
| ケーブル長:8 m | 日本語表記 | ||
| 英語表記 | |||
| ケーブル長:12 m | 日本語表記 | ||
| 英語表記 | |||
| ペンダント延長ケーブル | 4 m | TP, MP用 | |
| 8 m | TP, MP用 | ||
| HSR用 | 外付けバッテリユニット (外付けバッテリ仕様選択時) |
ケーブル 4 m | |
| ケーブル 8 m | |||
| ケーブル 12 m | |||
| Ethernet用コネクタ (Ethernet内蔵仕様選択時) |
ー | ||
| フランジ(8kg仕様) | ー | ||
| 品 名 / 仕 様 | ||
|---|---|---|
| HSR用ケーブル ※UL仕様は20m非対応です。 |
ストレート | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| アングル | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| 分 類 | 品 名 | ||
|---|---|---|---|
| RC8用増設ボード | パラレルI/Oボード (PCIスロット) |
NPNタイプI/O | コントローラに組付出荷 (ライセンス有) |
| ボード単品出荷(補給用) (ライセンス有) |
|||
| ボード単品出荷(補給用) (ライセンス無) |
|||
| ライセンス証のみ | |||
| PNPタイプI/O | コントローラに組付出荷 (ライセンス有) |
||
| ボード単品出荷(補給用) (ライセンス有) |
|||
| ボード単品出荷(補給用) (ライセンス無) |
|||
| ライセンス証のみ | |||
| DeviceNeスレーブ ボード (PCIeスロット) |
子局 | コントローラに組付出荷 (ライセンス有) |
|
| ボード単品出荷(補給用) (ライセンス有) |
|||
| ボード単品出荷(補給用) (ライセンス無) |
|||
| ライセンス証のみ | |||
| CC-Linkリモートデバイスボード (PCIeスロット) |
コントローラに組付出荷(ライセンス有) | ||
| ボード単品出荷(補給用)(ライセンス有) | |||
| ボード単品出荷(補給用)(ライセンス無) | |||
| ライセンス証のみ | |||
| PROFIBUSスレーブボード (PCIeスロット) |
コントローラに組付出荷(ライセンス有) | ||
| ボード単品出荷(補給用)(ライセンス有) | |||
| ボード単品出荷(補給用)(ライセンス無) | |||
| ライセンス証のみ | |||
| EtherNet I/Pアダプタボード (PCIeスロット) |
コントローラに組付出荷(ライセンス有) | ||
| ボード単品出荷(補給用) | |||
| ボード単品出荷(補給用)(ライセンス無) | |||
| ライセンス証のみ | |||
| 電動ハンドコントロールボード (PCIスロット) |
コントローラに組付出荷(ライセンス有) | ||
| ボード単品出荷(補給用)(ライセンス有) | |||
| ボード単品出荷(補給用)(ライセンス無) | |||
| ライセンス証のみ | |||
| RC8用 VGAオプション |
VGA中継ケーブルセット※1 | VGA中継ケーブルおよびコントローラに VGAコネクタを装着して出荷 |
|
| 設置用オプション | 壁掛用ステーセット | 壁掛、床置用 | |