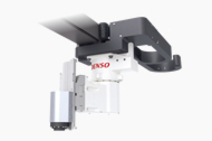
콤팩트한 보디에 뛰어난 파워와 스피드를 갖추었습니다.
최대 동작 영역|505・605mm
대 가반 질량|4kg
표준 사이클 타임|0.35초
기존 VS시리즈와 비교해 암 사이즈가 대폭 작아져 좁은 공간에서 가동을 가능케 합니다.
더 나아가 다운사이징과 동시에 고속성도 향상되어 사이클 타임 단축도 가능합니다.
또한, 통신 케이블 플랜지, 내악환경 타입(IP67), 외장 배터리 유닛 추가 등 고객이 사용 편의성을 향상시키는 옵션을 신규 추가했습니다.
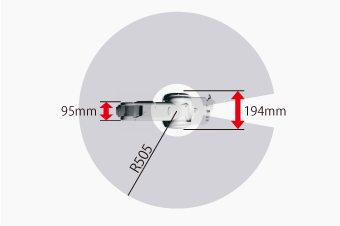
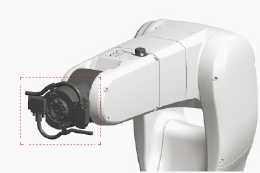
베이스 설치면적이나 암 각 부의 폭이 콤팩트합니다. 이것으로 좁은 공간 안에서도 유연한 가동을 할 수 있습니다.
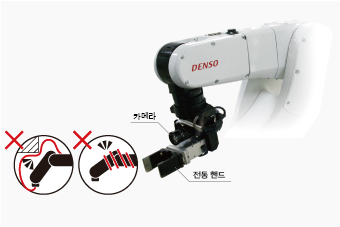
플랜지 선단(6축부)에 신호선 17심과 Ethernet 포트를 설치하는 옵션입니다. 이것으로 케이블의 엉킴, 단선을 걱정하지 않고 플랜지 선단에 전동 핸드나 카메라를 접속할 수 있습니다.

내악환경 타입(IP67)을 새로 추가하고 있습니다. 절삭수, 절삭분이 많이 드는 가공기 주변이나 물로 씻을 필요가 있는 환경에서 사용하는데 적합한 타입입니다.





| 항목 | 단위 | 사양 | ||
|---|---|---|---|---|
| 제품명 | - | VS-050 | VS-060 | |
| 축수 | - | 6 | ||
| 위치검출 방식 | - | Absolute 인코더 | ||
| 구동모터, 브레이크 | - | 모든 축 AC 서보 모터+모든 축 브레이크 부착 | ||
| 암 전장 (제1축 + 제2축) |
mm | 505(250+255) | 605(305+300) | |
| 최대동작영역(P점) | 505 | 605 | ||
| 동작 각도 | J1축 | ° | ±170(*4) | |
| J2축 | ±120 | |||
| J3축 | +151,-120 | +155,-125 | ||
| J4축 | ±270 | |||
| J5축 | ±120(*5) | |||
| J6축 | ±360 | |||
| 최대 가반질량 | kg | 4 | ||
| 최대 속도 | J1축 | deg/sec | 510 | |
| J2축 | 408 | 340 | ||
| J3축 | 490.09 | 393.04 | ||
| J4축 | 540 | |||
| J5축 | 415.5 | |||
| J6축 | 864 | |||
| 합성 최대속도 (툴 장착면 중심) |
mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 표준 사이클 타임(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 위치반복 정밀도(툴 장착면 중심)(*2) | mm | ±0.02 | ||
| 최대 허용 관성 모멘트 (이너셔) |
J4축,J5축 | kgm2 | 0.2 | |
| J6축 | 0.05 | |||
| 최대 허용 모멘트 | J4축,J5축 | Nm | 6.66 | |
| J6축 | 3.13 | |||
| 신호선・에어배관 전자밸브 (옵션) |
신호선 | - | 10심 (근접센서 등의 신호선)(*6)(*7) |
|
| 에어배관 전자밸브(*3) | - | 5계통(φ4×4,φ4×1) 전자밸브(2포지션、더블 솔레노이드 )×2 |
||
| 통신 케이블 플랜지 사양-A (옵션) |
- | 17심(카메라 등의 전원선)(*7) | ||
| - | LAN×1(1000BASE-T)(*8) | |||
| 에어원 | 상용 압력 | Mpa | 0.20~0.39 | |
| 허용 최대압력 | 0.49 | |||
| 공기전파소음 (A 가중 등가 지속 음압 레벨) |
dB | 65이하 | ||
| 보호등급 | - | IP40 | ||
| 질 량 | kg | 약27 | 약28 | |
| 항목 | 단위 | 사양 | ||
|---|---|---|---|---|
| 제품명 | - | VS-050 | VS-060 | |
| 축수 | - | 6 | ||
| 위치검출 방식 | - | Absolute 인코더 | ||
| 구동모터, 브레이크 | - | 모든 축 AC 서보 모터+모든 축 브레이크 부착 | ||
| 암 전장 (제1축 + 제2축) |
mm | 505(250+255) | 605(305+300) | |
| 최대동작영역(P점) | 505 | 605 | ||
| 동작각도 | J1축 | ° | ±170(*4) | |
| J2축 | ±120 | |||
| J3축 | +151,-120 | +155,-125 | ||
| J4축 | ±270 | |||
| J5축 | ±120 | |||
| J6축 | ±360 | |||
| 최대 가반질량 | kg | 4 | ||
| 최대 속도 | J1축 | deg/sec | 510 | |
| J2축 | 408 | 340 | ||
| J3축 | 490.09 | 393.04 | ||
| J4축 | 540 | |||
| J5축 | 415.5 | |||
| J6축 | 864 | |||
| 합성 최대속도 (툴 장착면 중심) |
mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 표준 사이클 타임(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 위치반복 정밀도 (툴 장착면 중심)(*2) |
mm | ±0.02 | ||
| 최대 허용 관성(관성 모멘트) | J4축,J5축 | kgm2 | 0.2 | |
| J6축 | 0.05 | |||
| 최대 허용 모멘트 | J4축,J5축 | Nm | 6.66 | |
| J6축 | 3.13 | |||
| 신호선・에어배관 전자밸브 (옵션) |
신호선 | - | 10심 (근접센서 등의 신호선)(*5) |
|
| 에어배관 전자밸브(*3) | - | 5계통(φ4×4,φ4×1) 전자밸브(2포지션、더블 솔레노이드 )×2 |
||
| 에어원 | 상용 압력 | Mpa | 0.20~0.39 | |
| 허용 최대압력 | 0.49 | |||
| 공기전파소음 (A 가중 등가 지속 음압 레벨) |
dB | 65이하 | ||
| 보호등급 | - | IP54(손목부IP65) | ||
| 질 량 | kg | 약27 | 약28 | |
| 항목 | 단위 | 사양 | ||
|---|---|---|---|---|
| 제품명 | - | VS-050 | VS-060 | |
| 축수 | - | 6 | ||
| 위치검출 방식 | - | Absolute 인코더 | ||
| 구동모터, 브레이크 | - | 모든 축 AC 서보 모터+모든 축 브레이크 부착 | ||
| 암 전장 (제1축 + 제2축) |
mm | 505(250+255) | 605(305+300) | |
| 최대동작영역(P점) | 505 | 605 | ||
| 동작각도 | J1축 | ° | ±170 | |
| J2축 | ±120 | |||
| J3축 | +151,-120 | +155,-125 | ||
| J4축 | ±270 | |||
| J5축 | ±120 | |||
| J6축 | ±360 | |||
| 최대 가반질량 | kg | 4 | ||
| 최대 속도 | J1축 | deg/sec | 510 | |
| J2축 | 408 | 340 | ||
| J3축 | 490.09 | 393.04 | ||
| J4축 | 540 | |||
| J5축 | 415.5 | |||
| J6축 | 864 | |||
| 합성 최대속도 (툴 장착면 중심) |
mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 표준 사이클 타임(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 위치반복 정밀도 (툴 장착면 중심)(*2) |
mm | ±0.02 | ||
| 최대 허용 관성(관성 모멘트) | J4,J5 | kgm2 | 0.2 | |
| J6 | 0.05 | |||
| 최대 허용 모멘트 | J4,J5 | Nm | 6.66 | |
| J6 | 3.13 | |||
| 신호선・에어배관 전자밸브 (옵션) |
신호선 | - | 10심 (근접센서 등의 신호선)(*4) |
|
| 에어배관 전자밸브(*3) | - | 4계통(φ4×4) 전자밸브(2포지션、더블 솔레노이드)×2 |
||
| 에어원 | 상용 압력 | Mpa | 0.20~0.39 | |
| 허용 최대압력 | 0.49 | |||
| 공기전파소음 | dB | 65이하 | ||
| 클린도(ISO14644-1) | - | ISO클래3 | ||
| 질 량 | kg | 약27 | 약28 | |
| 항목 | 단위 | 사양 | ||
|---|---|---|---|---|
| 제품명 | - | VS-050 | VS-060 | |
| 축수 | - | 6 | ||
| 위치검출 방식 | - | Absolute 인코더 | ||
| 구동모터, 브레이크 | - | 모든 축 AC 서보 모터+모든 축 브레이크 부착 | ||
| 암 전장 (제1축 + 제2축) |
mm | 505(250+255) | 605(305+300) | |
| 최대동작영역(P점) | 505 | 605 | ||
| 동작각도 | J1축 | ° | ±170 | |
| J2축 | ±120 | |||
| J3축 | +151,-120 | +155,-125 | ||
| J4축 | ±270 | |||
| J5축 | ±120 | |||
| J6축 | ±360 | |||
| 최대 가반질량 | kg | 4 | ||
| 최대 속도 | J1축 | deg/sec | 510 | |
| J2축 | 408 | 340 | ||
| J3축 | 490.09 | 393.04 | ||
| J4축 | 540 | |||
| J5축 | 415.5 | |||
| J6축 | 864 | |||
| 합성 최대속도 (툴 장착면 중심) |
mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 표준 사이클 타임(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 위치반복 정밀도 (툴 장착면 중심)(*2) |
mm | ±0.02 | ||
| 최대 허용 관성(관성 모멘트) | J4,J5 | kgm2 | 0.2 | |
| J6 | 0.05 | |||
| 최대 허용 모멘트 | J4,J5 | Nm | 6.66 | |
| J6 | 3.13 | |||
| 신호선・에어배관 전자밸브 (옵션) |
신호선 | - | 10심 (근접센서 등의 신호선)(*4) |
|
| 에어배관 전자밸브(*3) | - | 4계통(φ4×4) 전자밸브(2포지션、더블 솔레노이드)×2 |
||
| 에어원 | 상용 압력 | Mpa | 0.20~0.39 | |
| 허용 최대압력 | 0.49 | |||
| 공기전파소음 | dB | 65이하 | ||
| 클린도(ISO14644-1) | - | ISO클래5 | ||
| 질 량 | kg | 약27 | 약28 | |
| 항목 | 단위 | 사양 | ||
|---|---|---|---|---|
| 제품명 | - | VS-050 | VS-060 | |
| 축수 | - | 6 | ||
| 위치검출 방식 | - | Absolute 인코더 | ||
| 구동모터, 브레이크 | - | 모든 축 AC 서보 모터+모든 축 브레이크 부착 | ||
| 암 전장 (제1암 + 제2암) |
mm | 505(250+255) | 605(305+300) | |
| 최대동작영역(P점) | 505 | 605 | ||
| 동작각도 | J1축 | ° | ±170(*4) | |
| J2축 | ±120 | |||
| J3축 | +151,-120 | +155,-125 | ||
| J4축 | ±270 | |||
| J5축 | ±120 | |||
| J6축 | ±360 | |||
| 최대 가반질량 | kg | 4 | ||
| 최대 속도 | J1축 | deg/sec | 510 | |
| J2축 | 408 | 340 | ||
| J3축 | 490.09 | 393.04 | ||
| J4축 | 540 | |||
| J5축 | 415.5 | |||
| J6축 | 864 | |||
| 합성 최대속도 (툴 장착면 중심) |
mm/sec | 9,080(RC8),9,000(RC7) | 9,390(RC8),9,000(RC7) | |
| 표준 사이클 타임(*1) | sec | 0.35(RC8)、0.37(RC7) | ||
| 위치반복 정밀도 (툴 장착면 중심)(*2) |
mm | ±0.02 | ||
| 최대 허용 관성(관성 모멘트) | J4,J5 | kgm2 | 0.2 | |
| J6 | 0.05 | |||
| 최대 허용 모멘트 | J4,J5 | Nm | 6.66 | |
| J6 | 3.13 | |||
| 신호선・에어배관 전자밸브 (옵션) |
신호선 | - | 10심 (근접센서 등의 신호선)(*5) |
|
| 에어배관 전자밸브(*3) | - | 5계통(φ4×4,φ4×1) 전자밸브(2포지션、더블 솔레노이드 )×2 |
||
| 에어원 | 상용 압력 | Mpa | 0.20~0.39 | |
| 허용 최대압력 | 0.49 | |||
| 공기전파소음 (A 가중 등가 지속 음압 레벨) |
dB | 65이하 | ||
| 보호등급 | - | IP67(*6) | ||
| 질 량 | kg | 약27 | 약28 | |
| 분류 | 품명 | 수량 |
|---|---|---|
| 로봇&부속품 | 로봇 본체 | 1대 |
| 본체간 케이블(옵션품) | 1개 | |
| 방향지시 라벨 | 1장 | |
| 위치결정 핀(암나사 부착 위치결정 핀&다이어 핀) | 1세트 | |
| J2, J3 메카엔드용 스토퍼 볼트 | 4개 | |
| 컨트롤러&부속품 | 로봇 컨트롤러 | 1대 |
| 전원 케이블(5m) | 1개 | |
| 펜던트 없이 사용하는 더미커넥터(UL 사양은 제외) | 1개 | |
| 케이블 클램프 | 1개 | |
| 소프트웨어 등 | WINCAPSIII Trial 인스톨 디스크 | 1장 |
| 취급 설명서(매뉴얼 팩 디스크) | 1세트 | |
| 경고 라벨 | 1장 |
| 분 류 | 품 명 | ||
|---|---|---|---|
| I/O 케이블 | 표준 I/O 케이블 세트 | Mini I/O 케이블(8m)과 HAND I/O 케이블(8m)의 세트 |
|
|
Mini I/O 케이블(15 m)과
HAND I/O 케이블(15 m)의 세트 |
|||
| Mini I/O 케이블(68핀) | 8 m | ||
| 15 m | |||
| HAND I/O 케이블(20핀) | 8 m | ||
| 15 m | |||
| 패러렐 I/O용 케이블(96핀) | 8 m | ||
| 15m | |||
| 조작용 기기 | 다기능 티칭 펜던트 | 케이블 길이:4 m | |
| 케이블 길이:8 m | |||
| 케이블 길이:12 m | |||
| 미니 펜던트 키트 (WINCAPSIII Light를 포함) |
케이블 길이:4 m | 일본어 표기 | |
| 영어 표기 | |||
| 케이블 길이:8 m | 일본어 표기 | ||
| 영어 표기 | |||
| 케이블 길이:12 m | 일본어 표기 | ||
| 영어 표기 | |||
| 펜던트 연장 케이블 | 4 m | TP, MP용 | |
| 8 m | TP, MP용 | ||
| VS용 | 외장 배터리 유닛 | 케이블 4 m | |
| 케이블 8 m | |||
| 케이블 12 m | |||
| 브레이크 해제 유닛 | 케이블 4 m | ||
| 케이블 8 m | |||
| 케이블 12 m | |||
| 에어퍼지 유닛 | 내악환경 타입만 | ||
| 세컨드 암 커버-R(탭 구멍 있음) VS-050 / 060용 |
표준 타입(IP40)만 | ||
| 세컨드 암 커버-R(탭 구멍 있음) VS-068 / 087용 |
표준 타입(IP40)만 | ||
| J2 메카엔드용 스토퍼 볼트 M8 | VS-050 / 060 제2축용 | ||
| J3 메카엔드용 스토퍼 볼트 M5 | VS-050 / 060 제3축용 | ||
| J2 / J3 메카엔드용 스토퍼 볼트 M10 | VS-068 / 087 제2축, 제3축용 | ||
| HM용 | 플랜지 키트 | 20kg가반용 | |
| 10kg가반용 | |||
| HS용 | 플랜지 키트 | 5kg가반용 | |
| XR용 | 밸브 Assy 4연 매니폴드 밸브 | 단품 출하(보급품) | |
| 로봇 장착 출하 | |||
| 핸드 제어용 케이블 키트 | - | ||
| 핸드 제어용 케이블 | 2m | ||
| 품 명 / 사 양 | ||
|---|---|---|
| VM/VP/HM/HS/XR시리즈 이외 표준 케이블 (표준 사양 로봇에서 사용) |
스트레이트 | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| 앵글 | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| VM/VP/HM/HS/XR시리즈 방적 케이블 (방진・방적 사양, 클린 사양 로봇에서 사용) |
스트레이트 | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| 앵글 | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| VS-050/VS-060/ VS-068/VS-087용 케이블 |
스트레이트 | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| 앵글 | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| 분 류 | 품 명 | ||
|---|---|---|---|
| RC8 시리즈용 증설 보드 | 패러렐 I/O 보드 (PCI 보드) |
NPN 타입 I/O | 컨트롤러에 장착 출하 (라이센스 있음) |
| 보드 단품 출하(보급용) (라이센스 있음) |
|||
| 보드 단품 출하(보급용) (라이센스 없음) |
|||
| 라이센스증만 | |||
| PNP 타입 I/O | 컨트롤러에 장착 출하 (라이센스 있음) |
||
| 보드 단품 출하(보급용) (라이센스 있음) |
|||
| 보드 단품 출하(보급용) (라이센스 없음) |
|||
| 라이센스증만 | |||
| DeviceNet 슬레이브 보드 (PCI Express 보드) |
자국 | 컨트롤러에 장착 출하 (라이센스 있음) |
|
| 보드 단품 출하(보급용) (라이센스 있음) |
|||
| 보드 단품 출하(보급용) (라이센스 없음) |
|||
| 라이센스증만 | |||
| CC-Link 리모트 디바이스 보드 (PCI Express 보드) |
컨트롤러에 장착 출하(라이센스 있음) | ||
| 보드 단품 출하(보급용)(라이센스 있음) | |||
| 보드 단품 출하(보급용)(라이센스 없음) | |||
| 라이센스증만 | |||
| PROFIBUS 슬레이브 보드 (PCI Express 보드) |
컨트롤러에 장착 출하(라이센스 있음) | ||
| 보드 단품 출하(보급용)(라이센스 있음) | |||
| 보드 단품 출하(보급용)(라이센스 없음) | |||
| 라이센스증만 | |||
| EtherNet/IP 어댑터 보드 (PCI Express 보드) |
컨트롤러에 장착 출하(라이센스 있음) | ||
| 보드 단품 출하(보급용)(라이센스 있음) | |||
| 보드 단품 출하(보급용)(라이센스 없음) | |||
| 라이센스증만 | |||
| 전동 핸드 컨트롤 보드 (PCI 보드) |
컨트롤러에 장착 출하(라이센스 있음) | ||
| 보드 단품 출하(보급용)(라이센스 있음) | |||
| 보드 단품 출하(보급용)(라이센스 없음) | |||
| 라이센스증만 | |||
| RC8용 VGA옵션 |
VGA 중계 케이블 세트※1 | VGA 중계 케이블 및 컨트롤러에 VGA 커넥터를 장착하여 출하 |
|
| 설치용 옵션 | 벽면 설치용 스테이 세트 | 벽면 설치, 바닥 설치용 | |
| 품 명 / 사 양 | ||
|---|---|---|
| HS・HM・VM・VP・XR시리즈 VS-6556・VS-6577용 이외 표준 케이블 (표준 사양 로봇에서 사용) |
스트레이트 | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| 앵글 | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| HS・HM・VM・VP・XR시리즈 VS-6556・VS-6577용 방적 케이블 (방진・방적 사양, 클린 사양 로봇에서 사용) |
스트레이트 | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| 앵글 | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| XYC시리즈 이외 표준 케이블 | 스트레이트 | 4m |
| 6m | ||
| VS-050/VS-060/ VS-068/VS-087용 케이블 |
스트레이트 | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| 앵글 | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||












덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)