
We provides optimal applications fo each design, installation, operation, and maintenance scene.
It is a group of software that realizes "optimal" reduction of man-hours for each scene.
You can purchase only the software you need.
This programming software makes it easy for even a beginner to teach and operate devices, simply by placing items within the Arm View.
It can also be used to create a framework for more complicated programs.
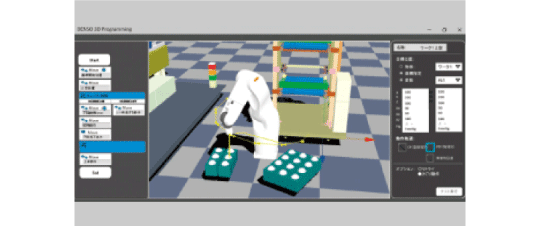
Operation and teaching are intuitive. Simply click or drag the robot within the Arm Viewer.
Commands such as flow control statements are shown along the trajectory of the robot, making it easy to see at a glance which operations are being performed on what trajectories.
Simply choose and place items for the target application from among the extensive selection of block programs, to create a program on the flowchart.
The overall program and any areas that need correction are easy to determine, which can reduce time spent programming.
Programs created using 3D Visual Programming can be converted to PacScript, DENSO's robot programming language.
Programs describing complicated operations can be created simply by writing an operation framework using 3D Visual Programming, and then converting the program into PacScript and adding more details.
3D Visual Programming can provide a visual representation of how a robot operates.
It can be used to easily share information with others, such as when describing the structure to colleagues involved with the robot, such as production or maintenance personnel.
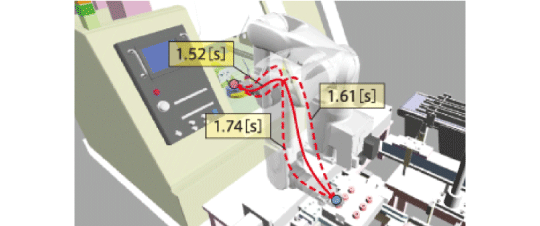
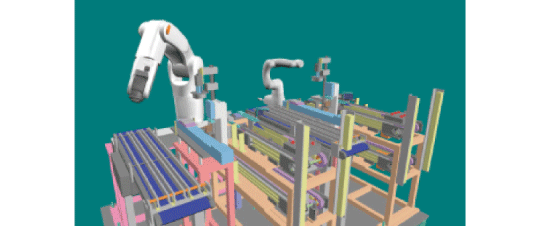
Simply specify the robot's operation start and end points to automatically generate the path with the shortest cycle time that avoids all obstructions.
Designing robot paths has traditionally relied upon the experience of the user. Now, these paths can be generated scientifically, so that experienced and inexperienced users alike can operate robots at the same level of performance.
First, import CAD data from the peripheral device. A path that avoids the peripheral device will be automatically generated after determining the start and end points. This can dramatically reduce time spent using the actual device to confirm operation and perform detailed teaching.
The shortest path that avoids collisions with peripheral devices is determined so that the robot moves efficiently, helping to reduce takt time.

A path that allows the robot to safely return to the origin is automatically generated from the automatically collected operation path, under the assumption that the path the robot automatically took is safe with no obstructions. It is also possible to redo partial operations in reverse.
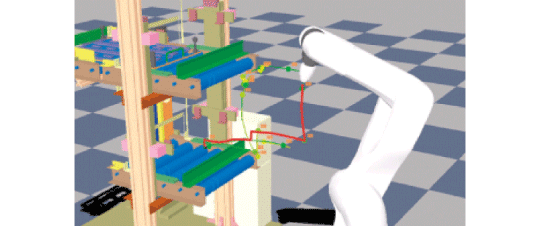
There is absolutely no need to create large programs to allow the robot to safely return to its work origin while avoiding collisions with peripheral devices.
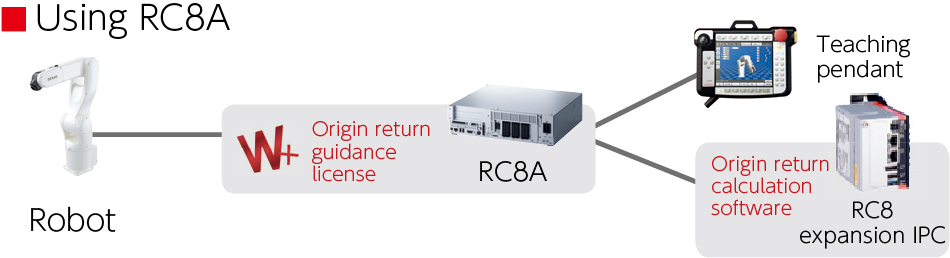
Smart TP allows the robot to easily return to its origin, making it easy even for site operators unfamiliar with controlling robots to work.

This 3D viewer is used with WINCAPS Plus software.
It allows 3D CAD data to be easily imported for display as a CAD model in WINCAPS III. It can also be used to verify layouts with conversion output robots and peripheral equipment.
* Can be used with WINCAPS III.
3D CAD data in various formats (STEP, IGES, VRML, X, etc.) can be imported.*
CAD models can also converted and export into various formats, such as VRML and STL.
* Parasolid is also planned to be supported
It can also be used to verify layouts with robots and peripheral equipment.
Model structures and placement are easily managed in a tree. After placement, model shapes can be simplified or expanded/contracted, making it easy to verify the layout.
This software makes palletizing and depalletizing processes easier, from simulation to execution.
Simply enter the shapes and dimensions of pallets and goods placed on them in the software. Calculations are automatically performed to display the target position based on the range of movement.
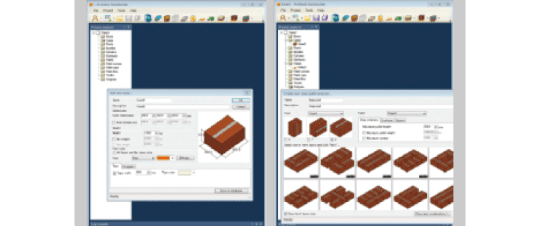
Palletizing and depalletizing process teaching has traditionally required a lot of time spent programming. Palletizing Builder dramatically reduces time spent on this process.
It can be used with VMB and VLA series high-load capacity and long-reach products.
The sizes of pallets and boxes can easily be set in the software.
The optimal pallet stacking method, stacking height, and weight of boxes can then be simulated, dramatically reducing the time spent on this process.

| Palletizing Builder | Optimized Motion Planner | Robot Viewer | 3D Visual Programming | |
|---|---|---|---|---|
| OS | ・Windows 10/64 bit Version 1803 or later ・Windows 11/64 bit |
|||
| Window size | WXGA(1280×800)or more | Full HD(1920 x 1080 )or more | WXGA(1024×768)or more | |
| CPU | Dual-Core 2GHz or faster | Quad-Core 2GHz or faster | ||
| Memory | 8GB or more | 16GB or more | ||
| GPU | ― | Single GPU recommended (onboard graphics not recommended) | ||
| Operation environment | Microsoft .NET Framework 4.7.2 or higher | Microsoft .NET Framework 4.7 or higher | ||






If you have not registered
The services on this member site are available only for registered customers.




































