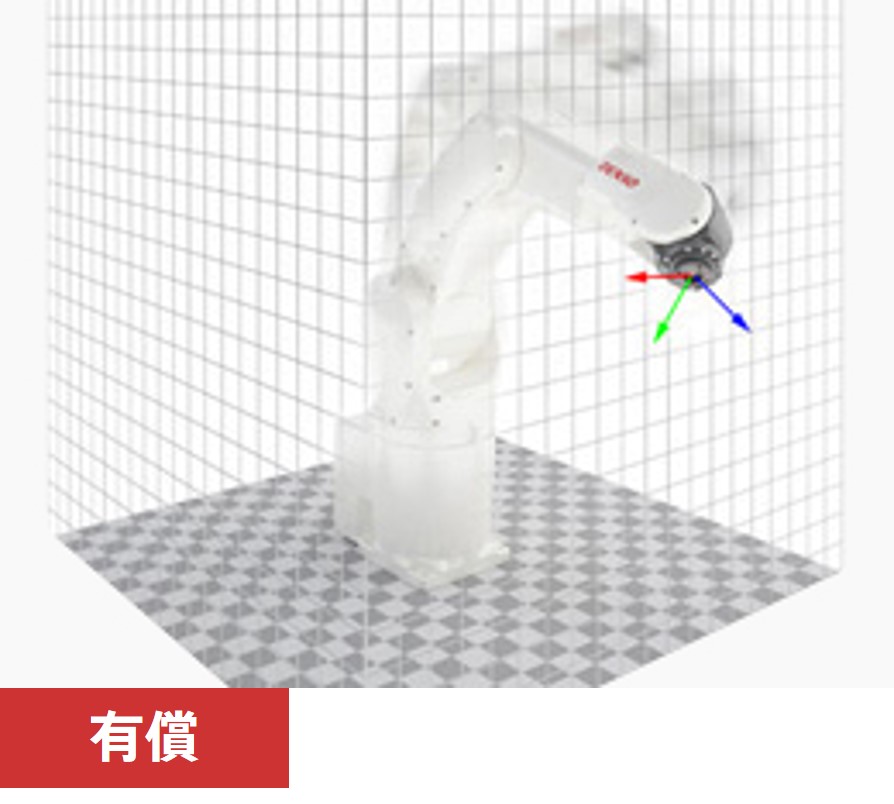
搬送作業やパレタイジング作業に適した高可搬・ロングリーチに対応したロボットです。
最大リーチ|2,503mm/2,257mm
最大可搬質量|40kg/60kg
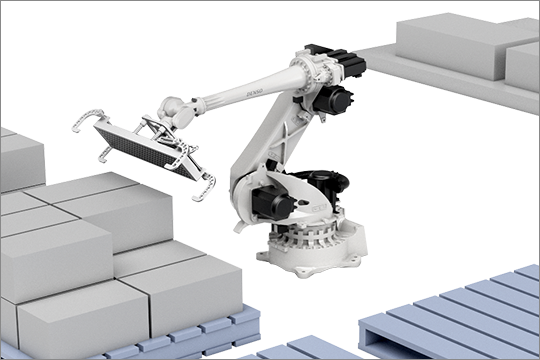
デンソーロボット最大可搬質量およびアーム長を有し、重荷物の搬送・パレタイジング作業の自動化に適しています。検査・移載・梱包などの工程にも活用できます。

保護等級IP67*に準拠しており、油やミストが飛散する厳しい環境下での自動化に貢献します。
*手首IP67、本体IP65に準拠
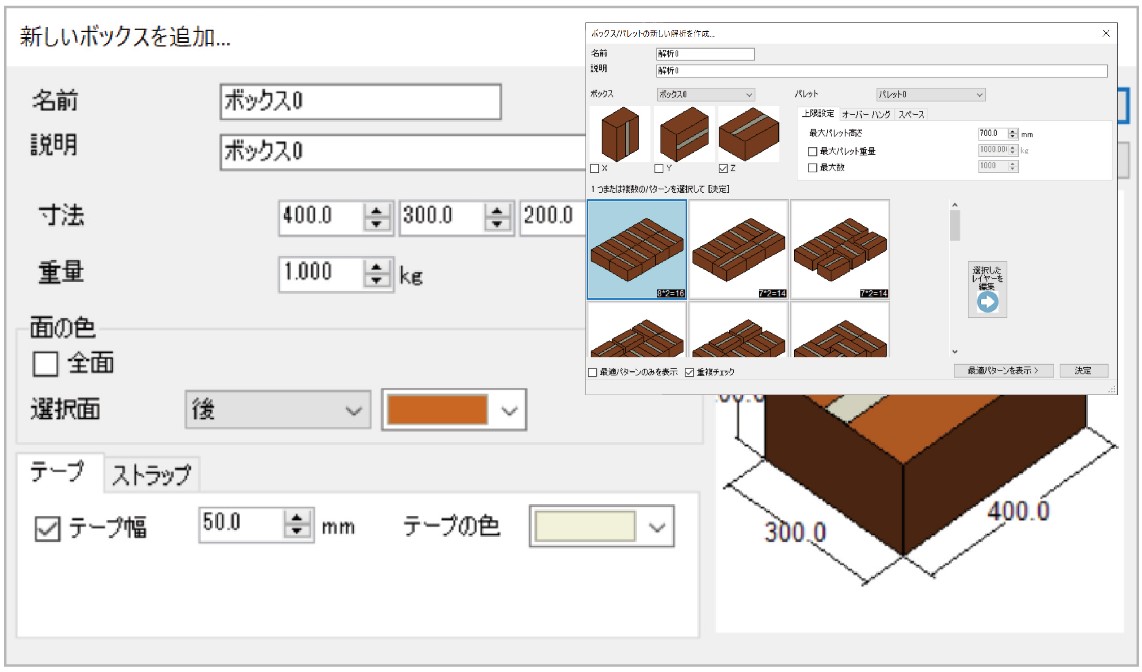
オフラインプログラミングソフトウェアWINCAPS製品の「パレタイジングビルダー」と組み合わせることで、パレタイジング作業をノンコーディングで自動化を実現します。

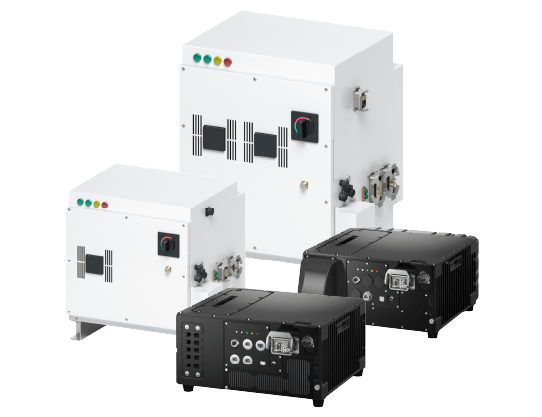
フィールドネットワークを機内配線しており、外回りの配線の煩雑さを低減可能です。
対応する通信規格:PROFINET/PROFIBUS/DeviceNet
DeviceNetなどのフィールドネットワークが機内配線されており、外回し配線の煩雑さを低減。
水平調節不可
水平調整不可

| 項 目 | 単 位 | 仕 様 | ||||
|---|---|---|---|---|---|---|
| 製品名 | - | VLA-4025 | VLA-6022 | |||
| 軸数 | - | 6 | ||||
| 位置検出方式 | - | アブソリュートエンコーダ | ||||
| 駆動モータ/ブレーキ | - | 全軸ACサーボモータ/全軸ブレーキ付 | ||||
| アーム全長(第1アーム+第2アーム) | mm | 2,085.5(860+1,225.5) | 1,835.5(860+975.5) | |||
| 最大動作領域 | mm | 2,503(P点 : 第4、第5、第6軸中心) | 2,257(P点 : 第4、第5、第6軸中心) | |||
| 動作角度 | 第1軸 | ° | -180 ~ 180*¹ | |||
| 第2軸 | ° | -60 ~ 125 | ||||
| 第3軸 | ° | -160 ~ 0 | ||||
| 第4軸 | ° | -2700 ~ 2700*⁴ | ||||
| 第5軸 | ° | -123 ~ 123 | ||||
| 第6軸 | ° | -2700 ~ 2700*⁴ | ||||
| 最大可搬質量 | kg | 40 | 60 | |||
| 位置繰り返し精度(ツール取付面中心) *² | - | X, Y, Z各方向:±0.06 | ||||
| 最大許容モーメント | 第4軸まわり | N・m | 167 | 221 | ||
| 第5軸まわり | N・m | 167 | 221 | |||
| 第6軸まわり | N・m | 98 | 118 | |||
| エア配管 | - | 1系統(内径Φ12.5) | ||||
| 信号線 | - | 14芯(19芯コネクタ) | ||||
| - | 15芯(17芯コネクタ)*³ | |||||
| エア源 | 許容最大圧力 | MPa | 2.0 | |||
| 騒音(等価騒音レベル[A特性]) | dB | 75 | ||||
| 保護等級 | - | 本体:IP65 / 手首:IP67 | ||||
| 本体質量 | kg | 約655 | 約645 | |||