●人の感覚や判断力を要する作業など、すべてをロボットで自動化することは困難でした。
●産業用ロボットは安全柵を要するため、人と協働作業をすることが困難でした。
ロボットが得意な作業はロボットが行い、ロボットには難しいが、人が得意な作業は人が行うことで、それぞれの得意分野を生かしながら連携して組立作業を実施します。
協働ロボットだからこそ人との連携作業で作業者の負荷を軽減し、作業効率をアップすることが可能となります。


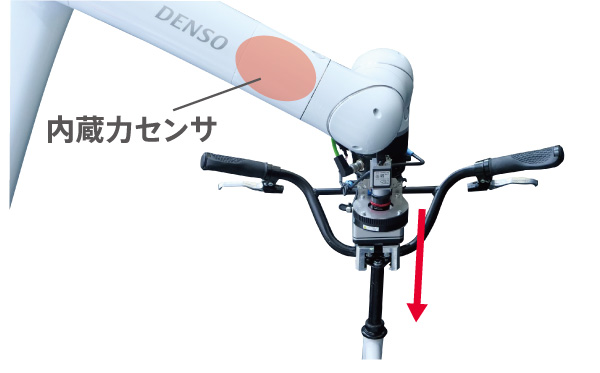
COBOTTA PROの内蔵力センサによる倣い動作でロボットアームをハンドル挿入位置までダイレクトに手動操作が可能です。
ハンドルのフレーム篏合時は進行方向に推力を持たせ、それ以外の軸は力を制限してこじりを防ぎ、高精度な組立作業を実現します。
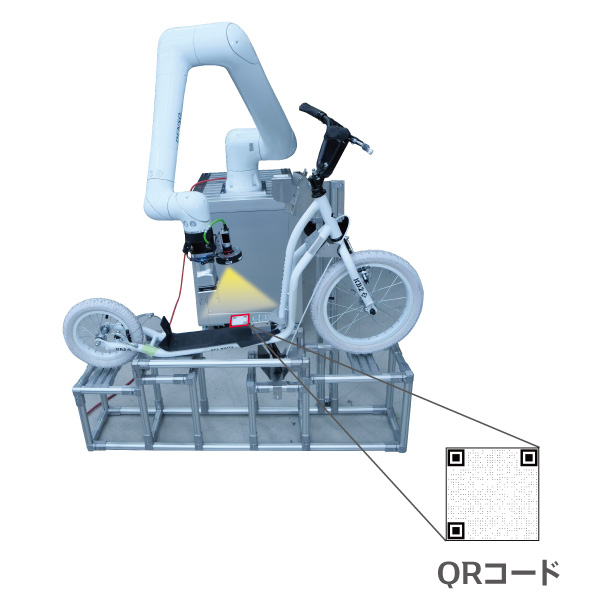
作業台に貼付されたQRコードを認識し、その座標系を基準にロボット座標の補正を自動で実行します。
ロボットアームと作業台の相対位置が変化した場合でもQRコードを認識することで再ティーチングすることなく座標の校正ができ、QRコードだからこそ、情報を付加し、ロボットへ作業指示等を与えることも可能です。