

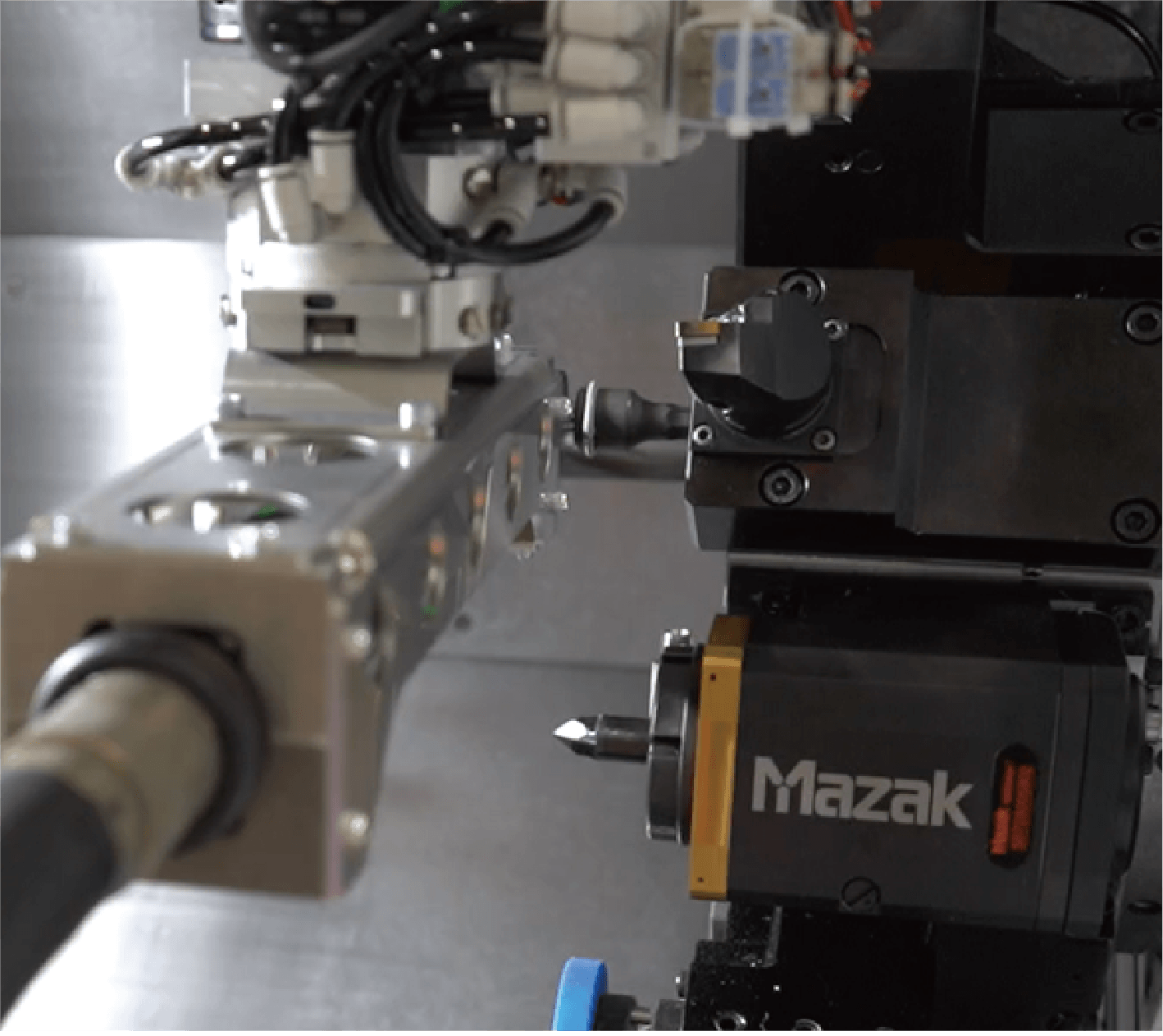
工作機械によるワークのハンドリングおよび、切削工具の交換など複雑な工程を、スリムで高剛性なアームを有するCOBOTTA PROに集約して自動化します。協働ロボットトップクラスの高速性や、内蔵力センサを活用した精密な作業により、多工程かつ複雑な作業の自動化を実現しています。
COBOTTA PRO専用ロボットコントローラ「CRC9」は、BECKHOFF社のIPCを搭載しているため、同社が提供するTwinCAT製品の実装や、EtherCAT対応製品との接続を可能にし、ロボット周辺機器をロボットコントローラで制御する、設備統合制御を実現します。

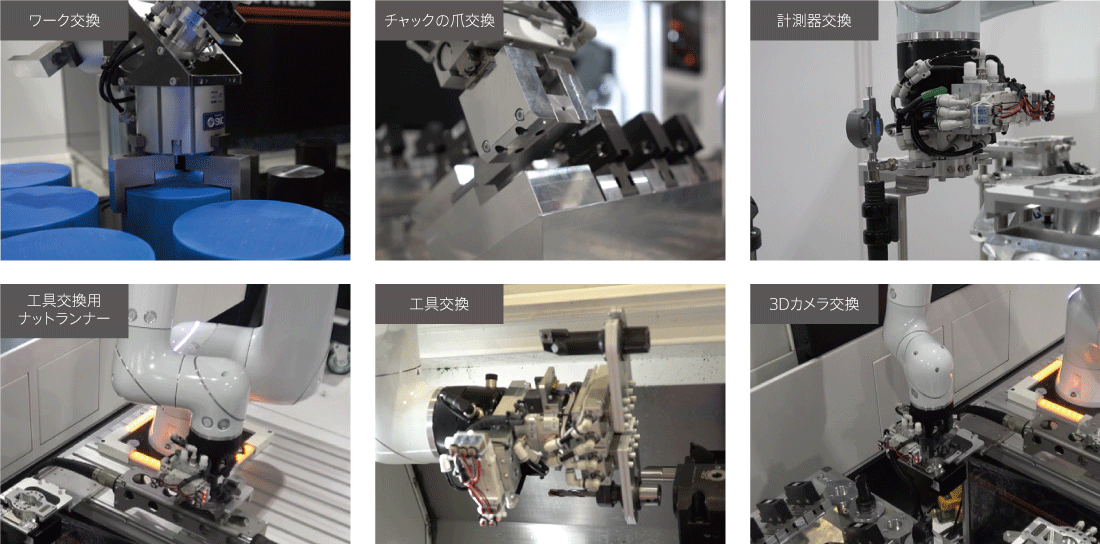
COBOTTA PROが、ダブルハンドを使用したワーク交換、ナットランナーを使用した工具交換、チャックの爪交換、計測機によるゲージ測定、3Dカメラ(Mech-Eye) を使用した切粉有無・刃具破損検査など、複数作業の自動化を高速・高精度に実現しています。COBOTTA PROは更なる高速性を求め、高速運転でも高精度に計測できる超軽量・高剛性 のトルクセンサと高出力モータを開発しました。これにより、高速動作、高加減速が可能になり、協働ロボットトップクラスの高速性を実現します。
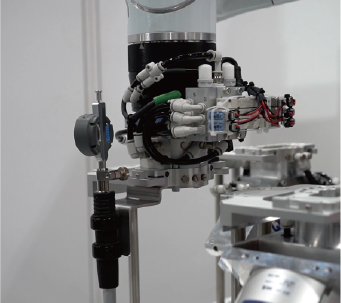
COBOTTA PROは、セカンドアームに力センサを内蔵しており、ハンド先端にかかる外力の値を取得可能です。取得した値に基づき内蔵力センサを活用した、力センサ有コンプライアンス機能*により、クリアランスの小さいチャックの爪交換を実現します。また、ナットランナーのビット合わせをする際にも、押し当て力を繊細に調整しながら締付時のネジ山の溝を合わせる作業を行うことができます。
*ライセンスが必要です。

ロボット本体に内蔵力センサを搭載
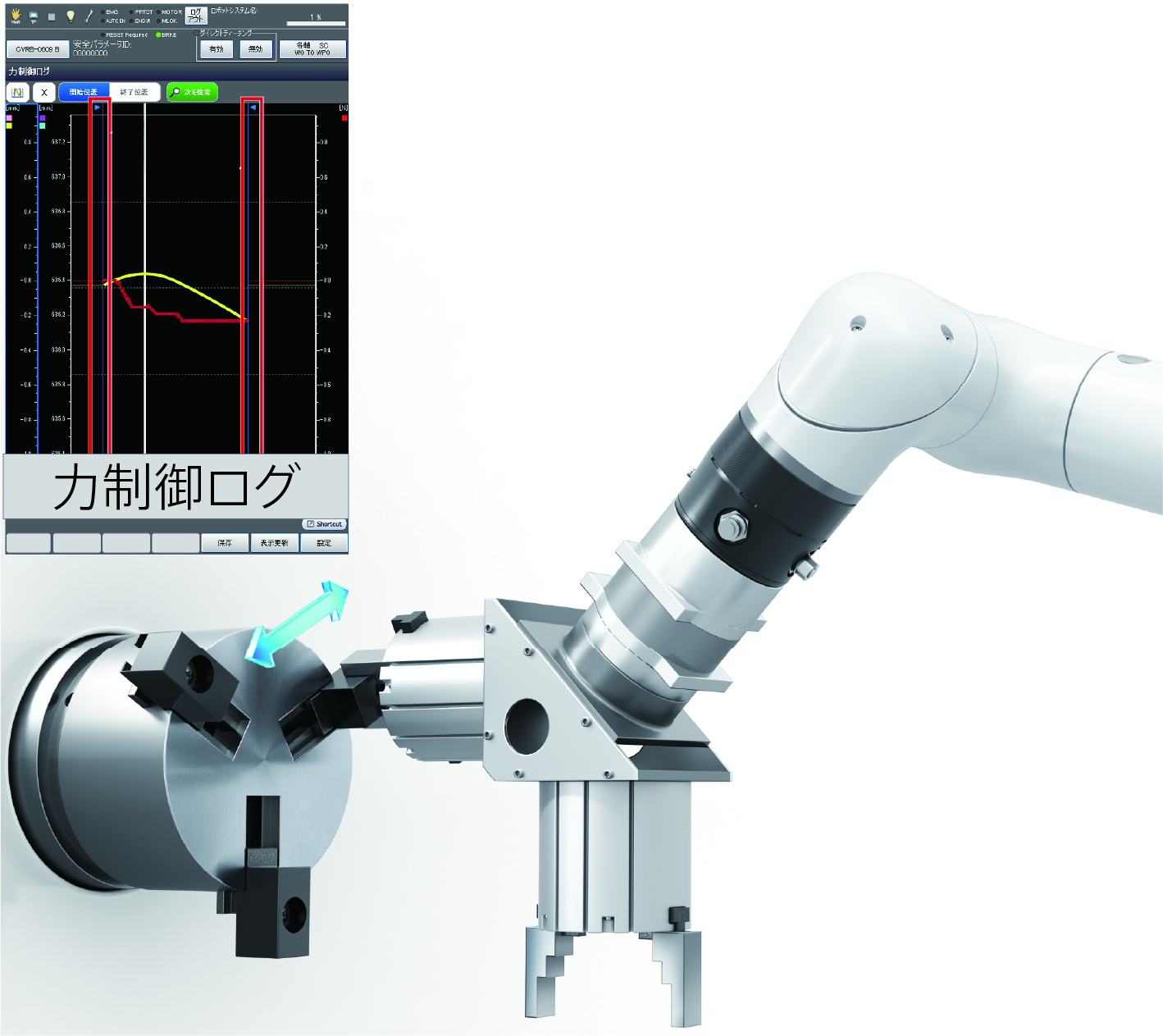
クリアランスの小さいチャック爪の交換
ナットランナーのビット合わせ
ツールまたはカメラのケーブルがロボットアームの外部に配線される場合、工作機械や周辺機器との干渉による絡みや断線リスクが課題でしたが、COBOTTA PROは、スリムなアーム内にツール用のケーブルを内蔵し、フランジ先端まで配線されているため、断線リスクを低減します。また、機内配線を活用することにより、ダイレクトティーチング時の操作のしやすさに貢献します。

スリムなアーム内に豊富な機内配線を実現
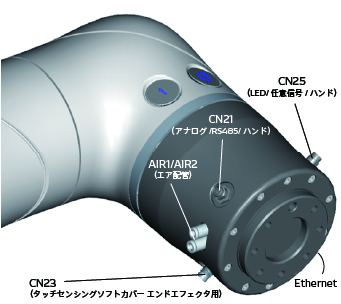
フランジ先端まで配線を内蔵
多点数の大型ハンドを機内配管・配線のみで制御
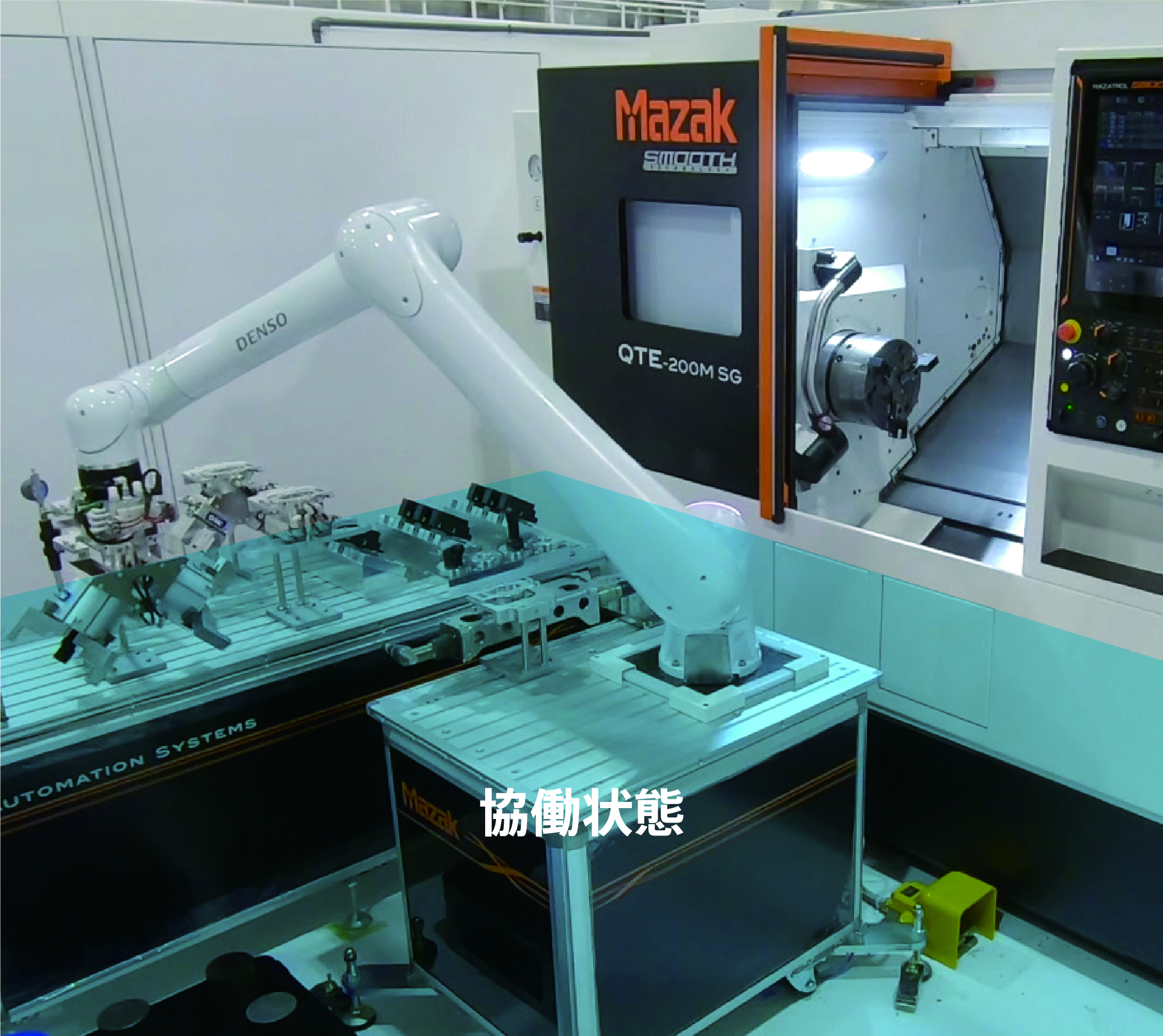
工作機械外部の動作は協働状態

工作機械内部の動作は高速動作
扉の開閉や主軸の旋回など、通常は操作盤で行う作業指示を音声指示で行えるため、手が使えない状況でも操作盤まで移動せずに操作できます。COBOTTA PRO専用ロボットコントローラ「CRC9」は、BECKHOFF社のIPCを搭載しているため、同社が提供するTwinCAT製品の実装や、EtherCAT対応製品との接続が可能です。

扉の開閉やタレット、主軸の旋回を音声操作

RC9はTwinCAT製品の実装が可能
3Dビジョン(Mech-Eye)*を活用して工作機械内部の切粉の有無や刃具の破損を確認しています。切粉がある場合は加工機の洗浄機能を作動させて除去します。AIビジョン搭載のMech-Eyeは不定形物の認識に優れており、小型・軽量のためCOBOTTA PROに取り付け可能です。
*オプション製品です。

Mech-Eye NANO
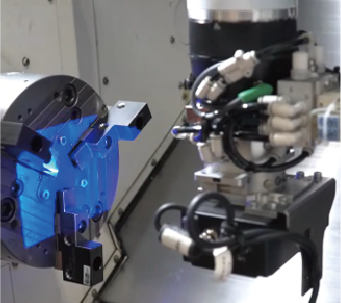
3Dビジョンで検査
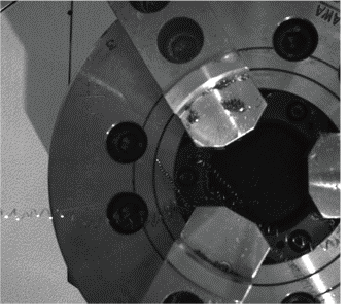
切粉の有無を確認

















































