COBOTTA PROのアームは凹凸の少ない丸みを帯びた設計となっており、万が一の衝突時のリスクを低減しています。また、ロボットの関節部に手が巻き込まれない構造となっています。

| 機能名 | 内容 |
| 非常停止機能 | ロボットを減速停止し、停止後にモータ動力をOFFする機能です。プログラムはリセット停止します。 |
| 防護停止機能 | 防護停止機能(保護停止機能)は、ロボット設備の安全防護物などの信号に接続し、信号の入力に応じてロボットを停止させる機能です。 |
| 速度監視機能 | ロボットが指定した動作速度を超えていないかを監視する機能です。 |
| 軸制限機能 | ロボットの各軸が指定した動作範囲を超えていないかを監視する機能です。 |
| トルク監視機能 | ロボットが指定したトルクを超えていないかを監視する機能です。 |
| 姿勢監視機能 | ロボットの姿勢が指定した姿勢から変化していない事を監視する機能です。 |
| 監視静止機能 | ロボットがモータON状態で停止し、移動していない事を監視する機能です。 |
| 汎用安全入出力機能 | Safety I/Oの汎用入力ピンに設定し、ピンへの入力で動作させることのできる機能です。 |
| セーフティーバーチャルフェンス機能 | ロボットがユーザが指定した動作範囲外に出ていないことを監視する機能です。 |
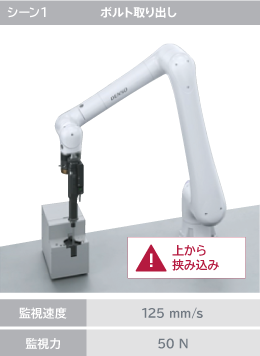
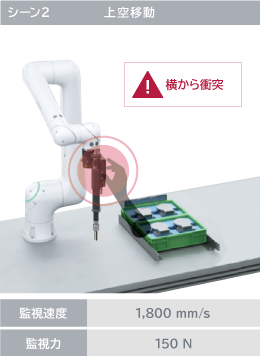


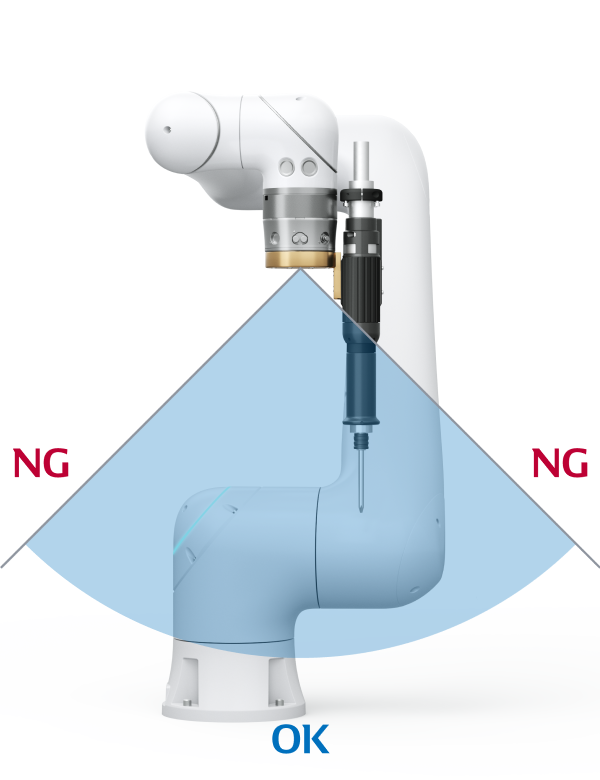
RLO(Robot-limited Orientation)機能とは、エンドエフェクタの姿勢を制御する機能です。従来、鋭利な部分をもつエンドエフェクタを装着していると、安全性を証明するのが難しいというリスクアセスメント上の課題がありました。COBOTTA PROでは、RLO機能とシーン機能を組み合わせ、ロボットの進行方向とエンドエフェクタの姿勢制限を紐づけることで、人との危険な衝突を回避することができ、リスクアセスメントを容易にします。
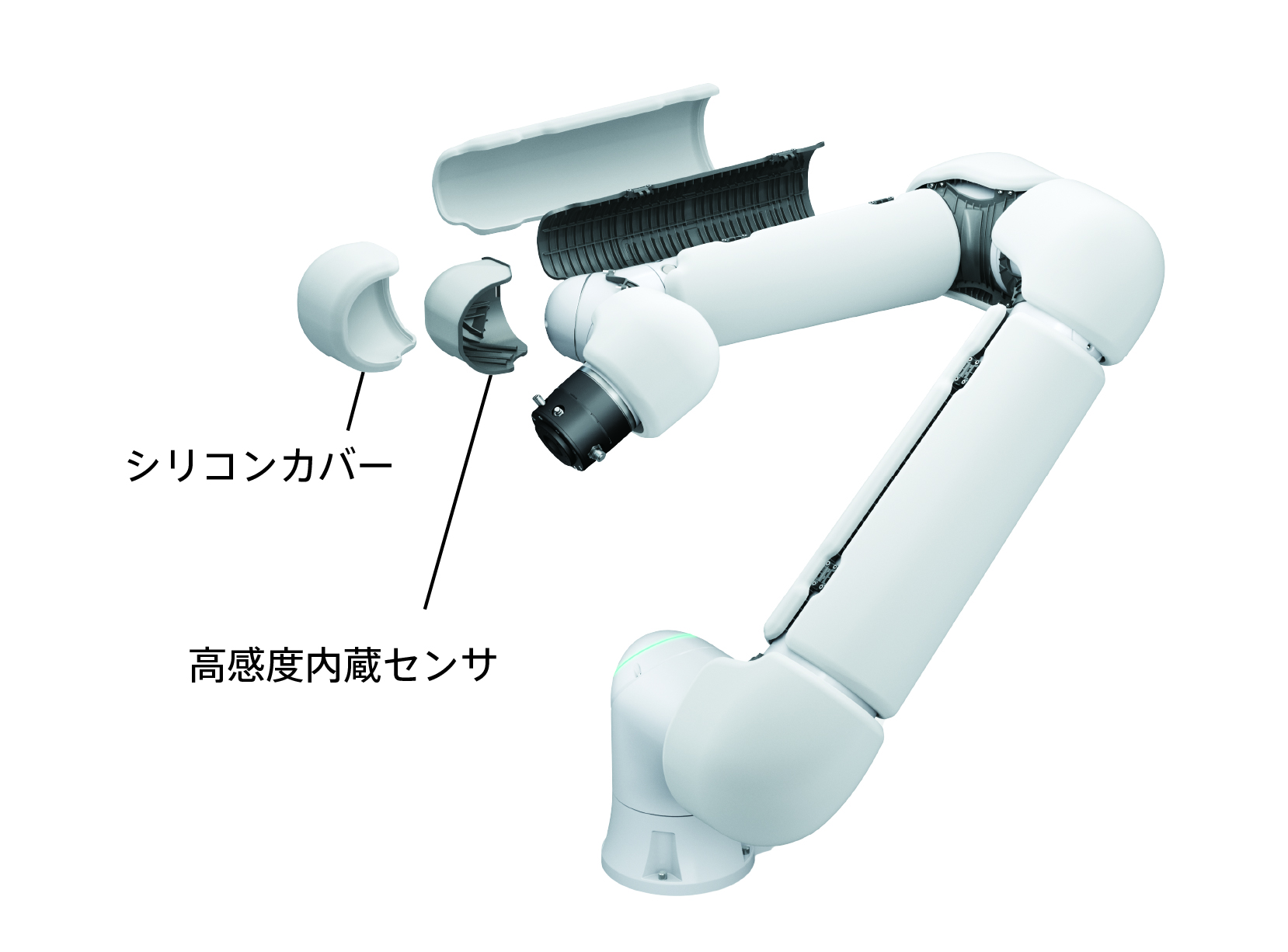
全て装着しても汎用的なソフトカバーと比べ、非常にスリムです。柔らかいシリコン部分と高感度内蔵センサの二重構造になっています。衝突を検出すると、高速に内蔵センサが反応し、ロボットを急停止させます。ソフトカバーが衝撃を吸収することで、人への衝撃力を抑える構造です。シリコン部分に突起を設けることで、高感度を実現しながらクッション性を高めました。その結果、ソフトカバーを装着することで、協働運転時の速度を向上することができます。 もちろん、COBOTTA PROは、ソフトカバーが無い状態でも協働ロボットとして、使用していただけます。

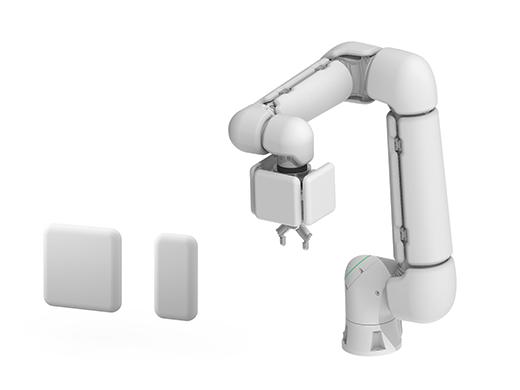
エンドエフェクタ用のカバーをサイズ違いで2種類ご用意しています。エンドエフェクタの形状にあわせてお使いいただけます。 鋭利な部分が一つであればRLO機能が有効ですが、鋭利な部分が多い場合はエンドエフェクタ用カバーで覆うことで高圧力での衝突を回避することができます。接触センサを搭載していますので、衝突を検知し、ロボットを停止させることができます。