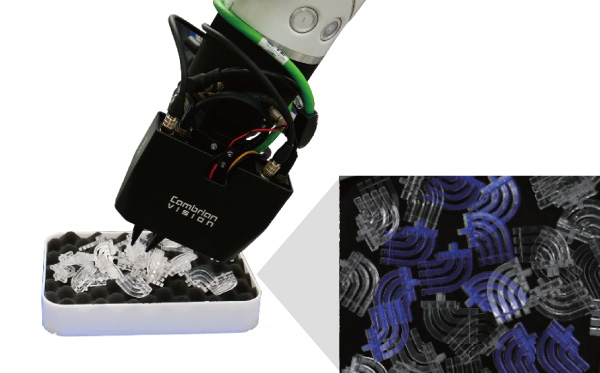
●従来の3Dビジョンは、小サイズ・透明・光沢ワークの認識を苦手としていました。
●従来の3Dビジョンは、外乱光の影響を受けやすく、外光条件の変化により高精度な認識が困難になる場合がありました。
ステレオカメラにより、対象物認識にストラクチャードライトや赤外線等補助照明が必要なく、
様々な外光条件下で高い安定性を発揮し、 透明、光沢ワークの認識も可能です。

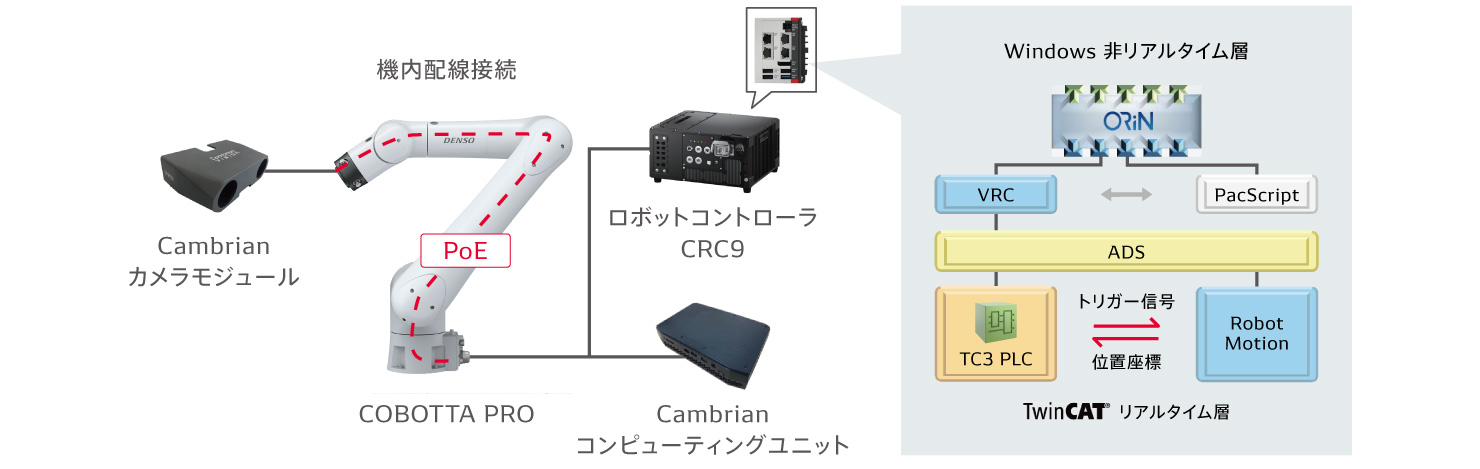
Cambrianカメラが撮像時に出力するカメラトリガー信号を、RC9のTwinCATリアルタイム層内のTwinCAT PLCが1ms周期で監視し取得することによって、撮像した瞬間のロボットアームの位置情報を正確に把握し、座標変換する処理を瞬時に行うため、ロボットが動いている状態でも撮像が可能です。停止時間不要のため、サイクルタイム短縮を実現します。