

●食品製造における計量作業は、専用の機械を導入するか人手で行うことが多く、コストやスペース、人員の確保が課題でした。
●不定形な食材は、掴む・置く作業の自動化が困難でした。
●ロボットとの協働計量は、安全性や速度不足の面で社内基準を達することができず、導入が難しいことが課題でした。
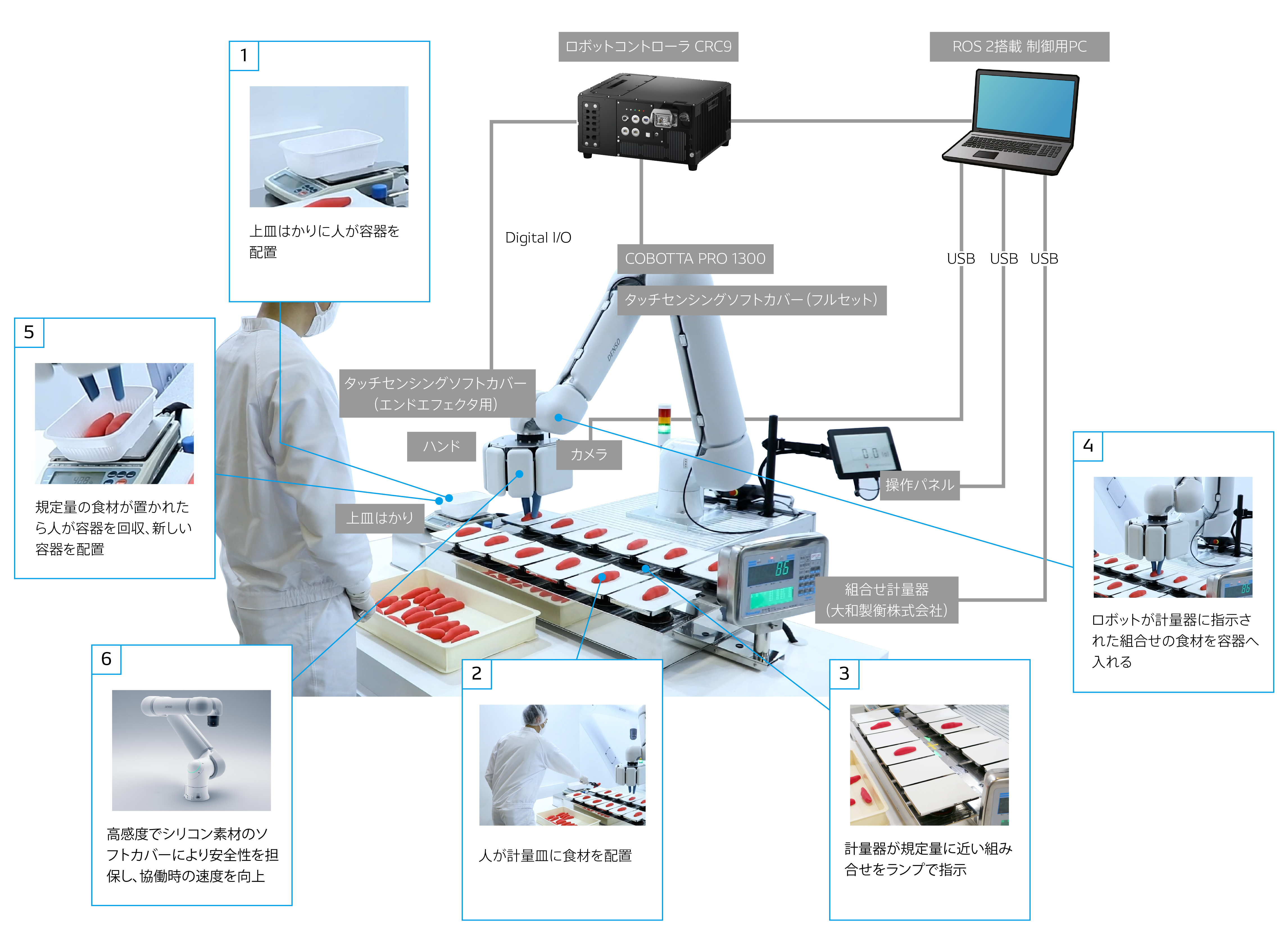
従来、人ふたりが対面で行っていた組合わせ計量器での食材計量をCOBOTTA PROと人で分業することで省人化を実現します。
スペースが限られる食品工場でも、安全柵を設置することなく人との協働作業が可能です。

コンベアやフィーダで扱うことが難しい崩れやすい食材をソフトハンドで把持します。
食材の把持位置は、計量器からの位置データ取得と3Dカメラを活用することにより、正確な場所を認識します。
※エンドエフェクタ用タッチセンシングソフトカバー内に3Dカメラを装着しています。


ROS 2でロボット動作・画像処理・組合せはかりを制御・監視しており、状況に応じてロボットを稼働させます。
ロボットが計量皿から食材を取りに行く途中に、人間が同対象の食材をピッキングした場合、ロボットは、目標を変更して別の計量皿へアプローチします。

接触を高感度に感知することが可能なソフトカバーにより、協働運転時の速度を向上させ、より高い生産性を求めることが可能です。人と接触する可能性が高いハンド周辺までカバーを装着できます。ソフトカバー装着時は最大2,000mm/sで動作することが可能です。
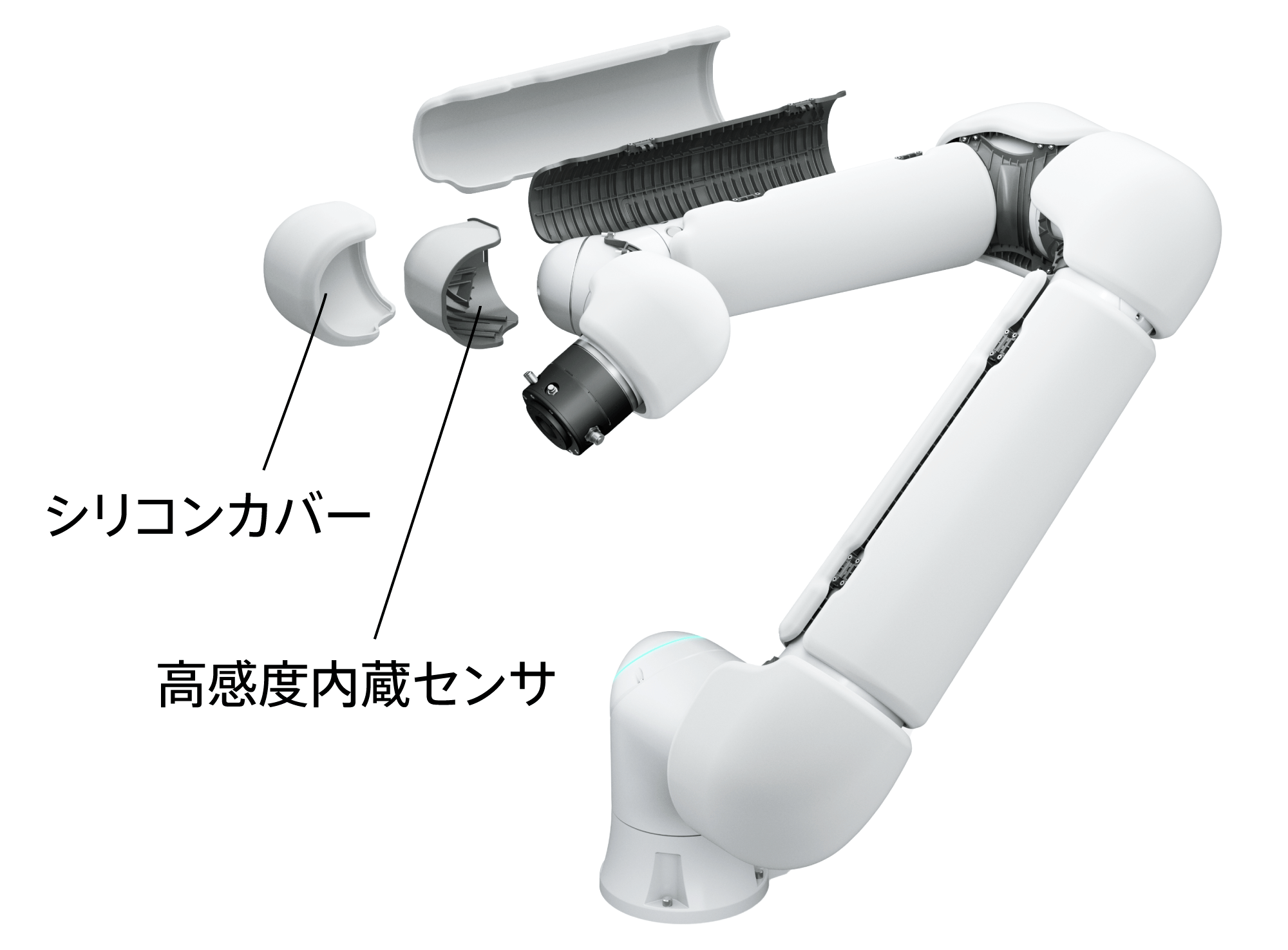
エンドエフェクタまで装着できるソフトカバーにより、衝突を検出すると、高速に内蔵センサが反応し、ロボットを急停止させます。ソフトカバーを装着することで、協働運転時の速度を向上させ、より高い生産性を求めることができます。
















































