

●食品工場におけるフライの調理現場は、蒸し暑い作業場での熱中症、高温の油によるやけどなどの可能性がありました。
●単調な作業かつ暑い作業場という厳しい環境から、作業員が集めにくいという人員課題も挙げられます。
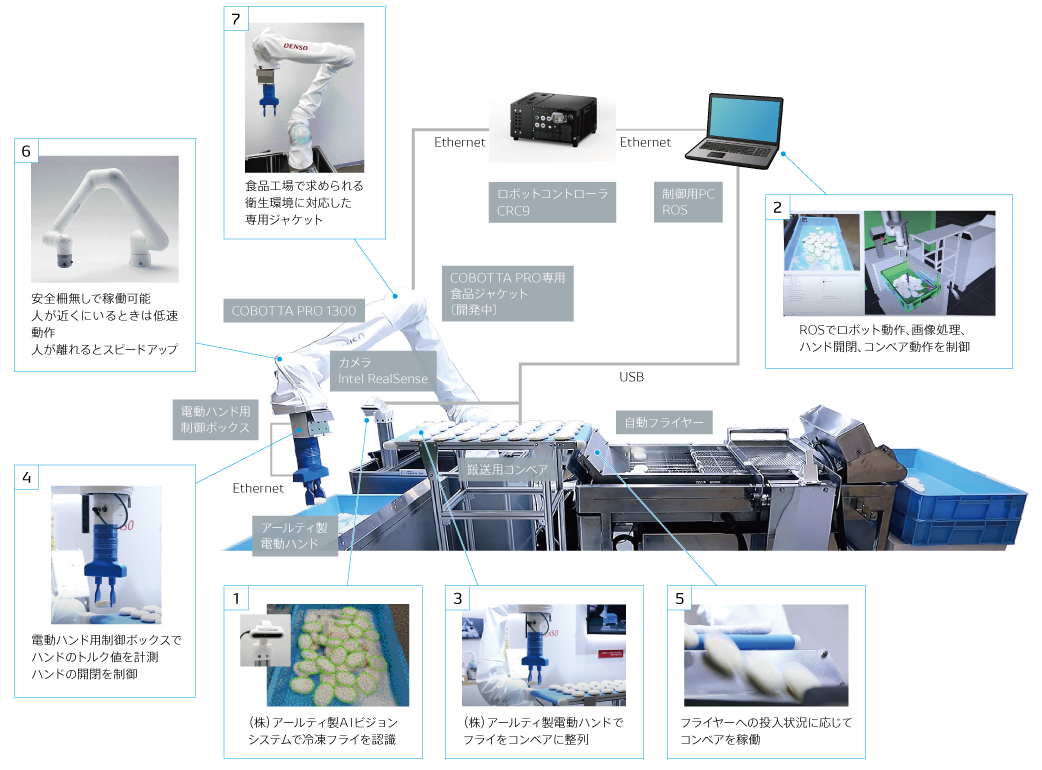
高速人協働ロボット「COBOTTA PRO」を活用することで、既存の工場の製造ラインで人手作業を行っていた箇所に組み込み可能。
安全柵無しで省スペースに導入できます。

株式会社アールティ様製のAIビジョンシステムで番重(食品コンテナ)に山積みとなった不定形の冷凍フライを認識、同社製の電動ハンドで把持し、コンベアに整列します。
電動ハンド用制御ボックスでハンドのトルク値を計測し、ハンドの開閉を制御しています。
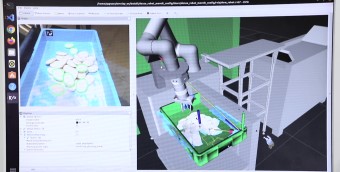
今回のアプリケーションはROSでロボット動作・画像処理・ハンド開閉・コンベア動作を制御しており、フライヤーの投入状況に応じてコンベアを稼働させます。

食品工場で求められる衛生環境に対応したCOBOTTA PRO専用ジャケット*を準備。
グリスの飛散などから食品を守ります。
*開発中の製品です。

















































