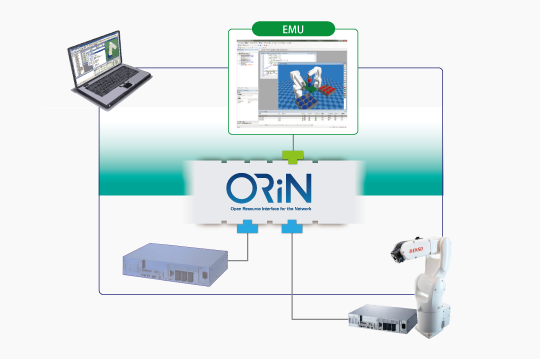
EMU(Enhanced Multi-robot simulator)는 각종 덴소 로봇의 시뮬레이션을 가능하게 하는 소프트웨어입니다.
•WINCAPS®Ⅲ으로 작성한 프로젝트를 활용하여 주변기기(모델)와의 연계와 가상과 현실의 혼재 상태에서 동작 검증이 가능합니다.
•덴소 로봇을 주체로 한 설비에 관해 설계단계에서의 사전검증, 생산 시스템의 수직적 가동을 지원합니다.
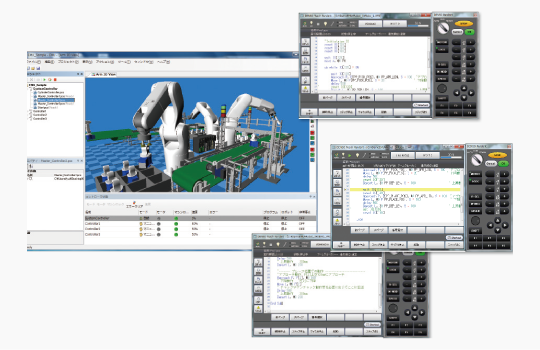
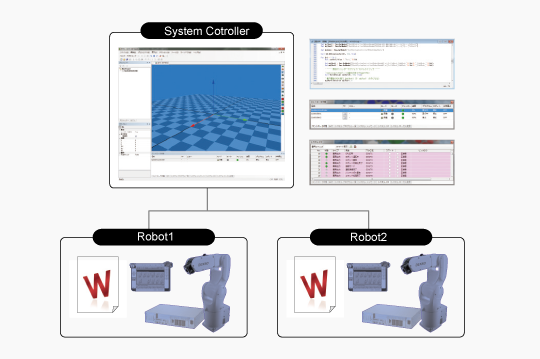
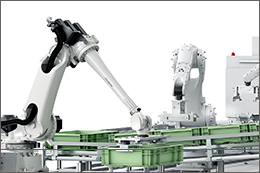
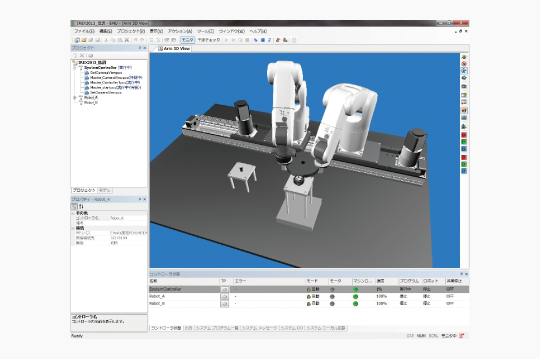
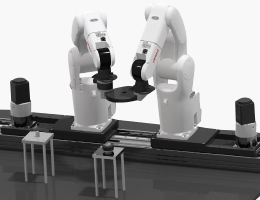
시스템 컨트롤러의 프로그램에서 각 로봇을 기동하거나 변수나 I/O를 조작하여 설비 전체의 동작 시퀀스를 제어할 수 있습니다. 또한, 여러 대의 덴소 로봇을 사용한 협조동작 검증이 가능합니다.
실제 장치와 접속하여 실제 장치에서 취득한 로봇의 현재 위치정보를 3D 뷰 윈도우 상에 표시할 수 있으므로 가상과 현실이 혼재한 상태에서 동작 검증도 가능합니다.
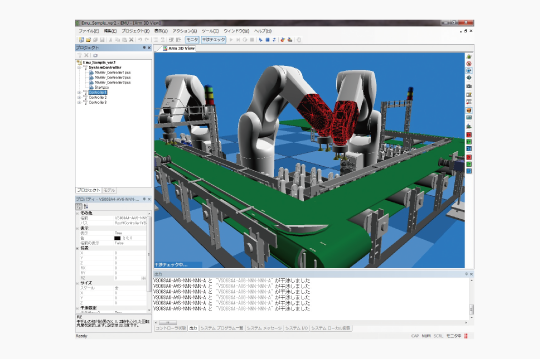
장치 간의 간섭 체크나 동작 시퀀스를 사전에 검증함으로써 설계 초기 단계에서의 완성도를 높일 수 있어 개발 기간의 단축과 비용 절감에 기여합니다.
공작물 반송 컨베이어, 로더 등 주변장치와 로봇을 연동시킨 설비 전체 동작을 실제 장치를 사용하지 않고 검증할 수 있습니다.
【OS】 Windows® 10 / 11
【PC】 CPU 멀티코어 프로세서2GHz、 메모리 2GB、 HDD 1GB이상
【카메라】 Basler사 GigE카메라 (ace시리즈)、 iDS사 USB카메라(uEye SE시리즈)、 Canon사 네트워크 카메라(WebView Livescope시리즈)



덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)