Software that enables simulation of multiple DENSO Robotics.
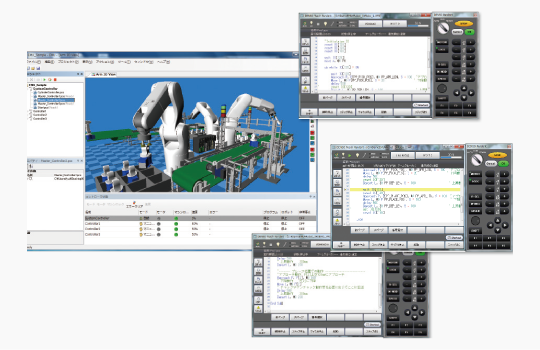
● EMU allows you to use projects created in WINCAPS® III, coordinating with peripheral devices (models) and testing functionality in a state that is both virtual and real.
● EMU helps you achieve vertical startup for preliminary testing and production systems at the design stage for equipment centered on DENSO Robotics.
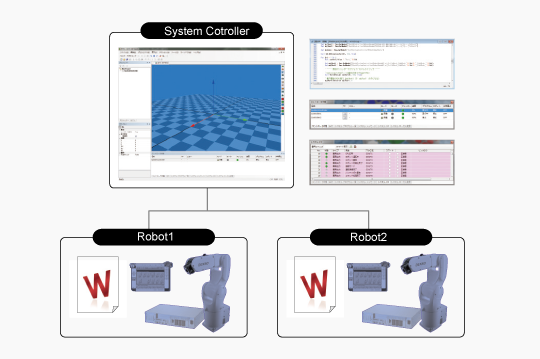
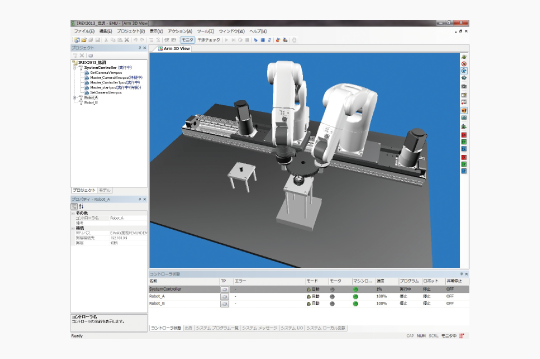
You can control all operating sequences for each robot by starting up each robot and using variables and I/O from the system controller
program.Coordinated operation testing using multiple DENSO Robotics is also possible.
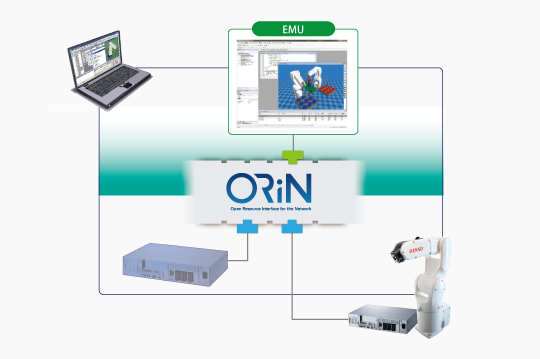
Connecting with a machine enables you to view current position information for the robot obtained from the machine in a 3D viewer and authenticate motion in a mixed virtual and real environment.
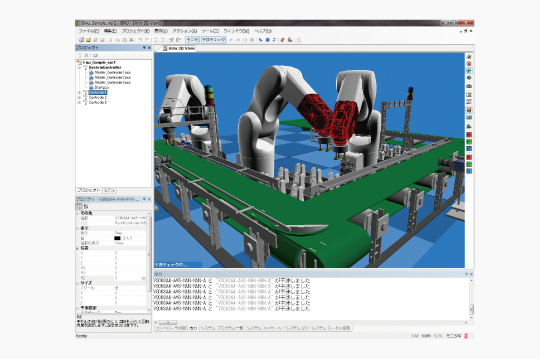
Being able to check for interference between devices and preliminarily test operating sequences ensures a higher degree of perfection at the initial stage of design while helping shorten development times and reduce costs.
EMU enables testing of the operation of all equipment linked to robots and peripheral devices such as workpiece conveyers and loaders without using the actual equipment.
[OS] Windows® 10 / 11
[PC] CPU 2 GHz or faster multi-core processor, Memory 2 GB or more, HDD 1 GB or more




If you have not registered
The services on this member site are available only for registered customers.




































