EMU(增强型多机器人模拟器)是可以模拟多台 DENSO机器人的软件。
利用WINCAPS®Ⅲ制作的方案,可实现与周边设备(模型)的联动,以及虚拟和现实混合存在状态下的运行验证。
支持以DENSO机械手为主体的设备设计阶段的事前验证和生产体系的快速启动。
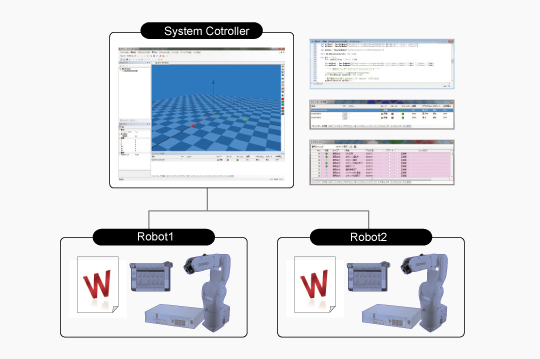
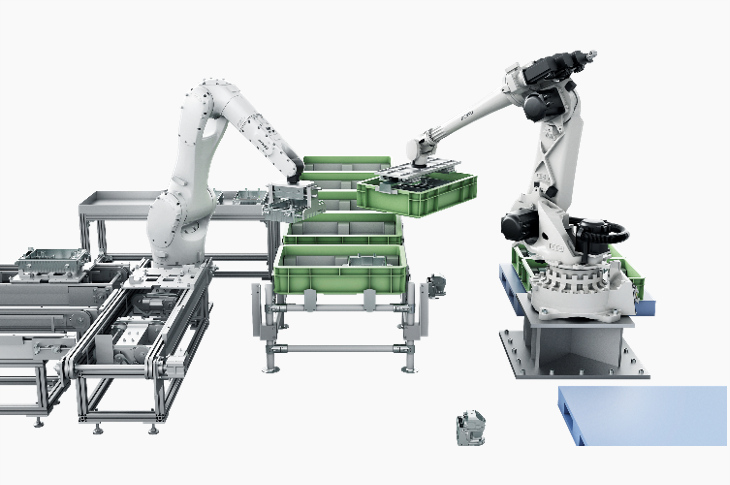
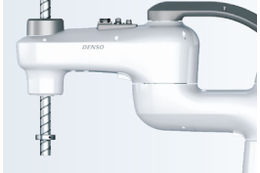
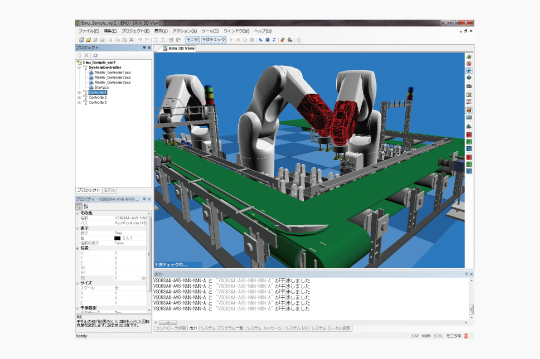
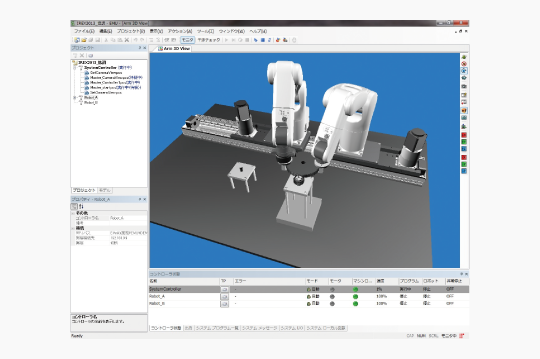
通过系统控制器的程序起动各个机械手或操作变量和I/O,可控制整套设备的运行时序。同时,还可验证使用多台DENSO机械手时的动作协调性。
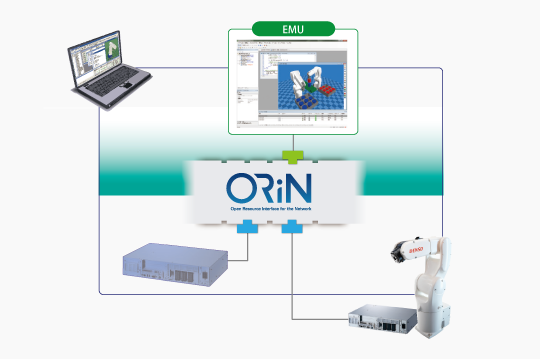
与实际设备连接后,从实际设备上获取的机械手当前位置信息可在3D视频窗口显示。这样,即可实施虚拟与现实混合存在状态下的运行验证。
事先验证装置间的干扰和运行时序,可提高设计初期阶段的完成度,有助于缩短开发周期和削减成本。
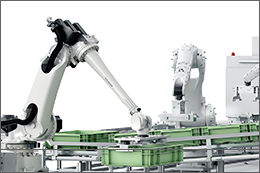
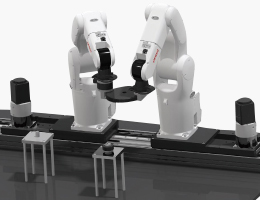
无需使用实际设备,即能验证工件搬运传送带、装载机等周边设备与机械手联动的整套设备的运行。
【OS】 Windows® 10 / 11
【PC】 CPU 多核处理器2GHz、内存 2GB、HDD 1GB以上
【摄像机】Balser产GigE摄像机(Ace系列)、iDS产USB摄像机(uEye SE系列)、Canon产网络摄像机(WebView Livescope系列)
为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)