製品
活用シーン
導入事例
ダウンロード
サポート
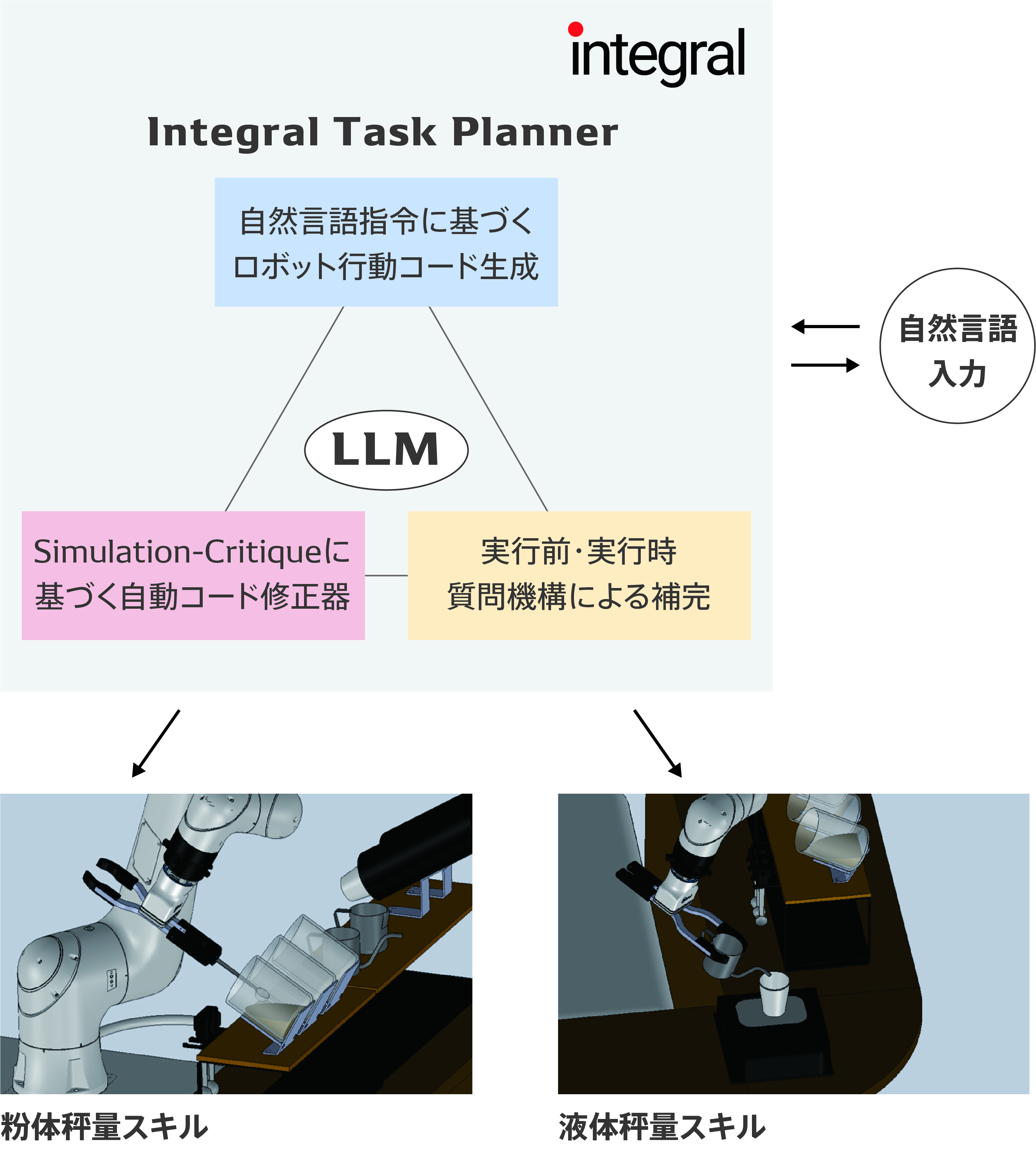
●不定形物を秤量する工程では、秤量動作の条件が膨大になり、プログラミングによる動作生成は困難でした。
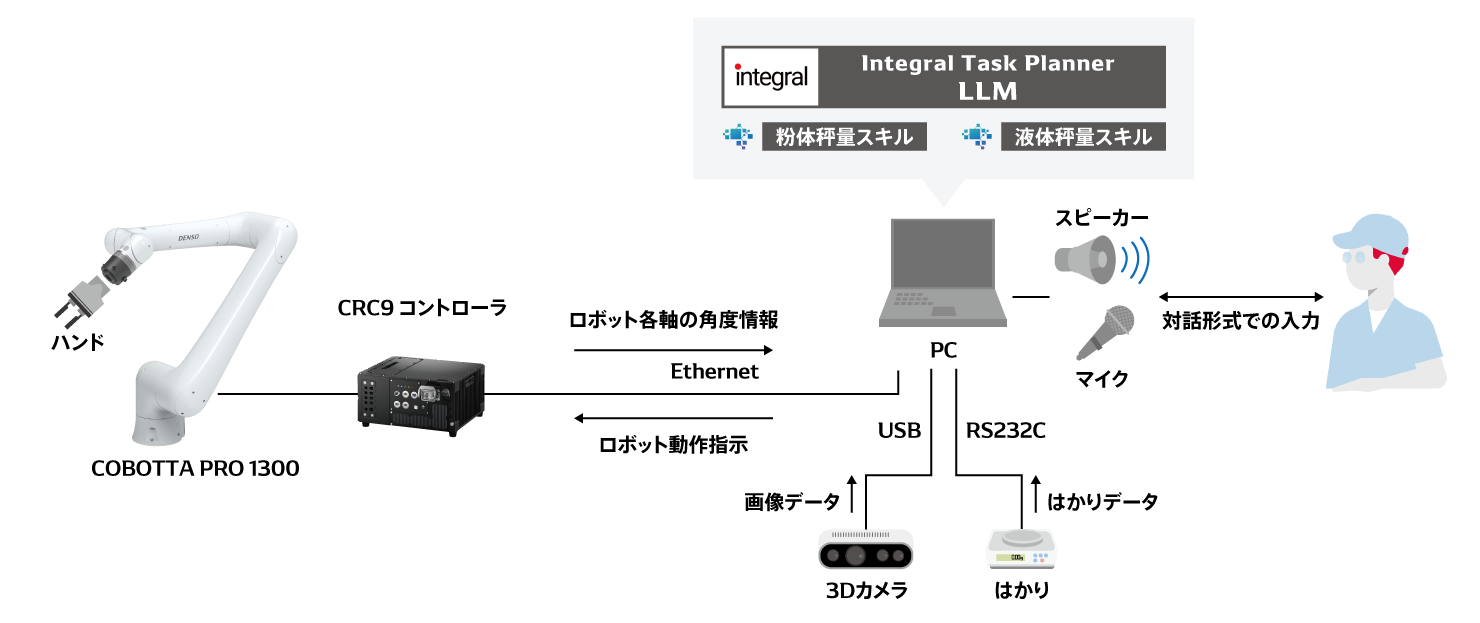
カメラで容器内を撮影し、粉体の残量や偏りなどの情報に基づいて、学習させたAIモデルにより、粉体のかき集めや、攪拌動作などを選択し継続的なすくい動作を実現します。
ロボットの各軸の角度情報と、はかりの重量に基づいて、学習させたAIモデルにより、流体の特性や容器の形状に関わらず、指定された重量の液体を高精度で注ぐ動作を実現します。
AI液体秤量スキルを活用した自動調合
人協働ロボット COBOTTA PROを活用した協働計量システム
人協働ロボット COBOTTA PROを活用した惣菜盛り付けシステム
パスワードを忘れた方はこちら
まだ会員に登録されていない方
本会員専用サイトにおけるサービスは、会員登録していただいた上でのみご利用いただけます。
新規会員登録