どこでも、いますぐ、かんたんに。みんなと一緒に働くロボット。
人にやさしいフォルムに、持ち運びしやすい小さな体。どこでも自由に連れて行き、すぐに作業を自動化します。
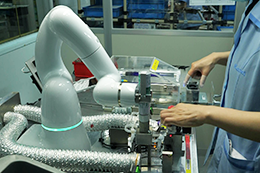
自社工場における自動車部品製造の生産性向上を目的に、デンソーロボットの開発をはじめ50年。新たに世におくる産業用人協働ロボット、COBOTTA。人にやさしいフォルムに、持ち運びしやすい小さな体。どこでも自由に連れて行き、すぐに作業を自動化する。しかも、専門知識を持たずとも、驚くほど簡単に。人手が足りないから、ちょっと手伝ってほしい。単純作業はロボットに任せて、もっと創造的な仕事をしたい。ユーザのニーズや使い方次第で、どこまでも、無限に可能性を広げるCOBOTTA。その想像は、尽きることがありません。

課題の最適な解決を求めているとき、アイデアを実現する方法を模索しているとき、COBOTTAは、様々な場面で私たちをサポートしてくれます。
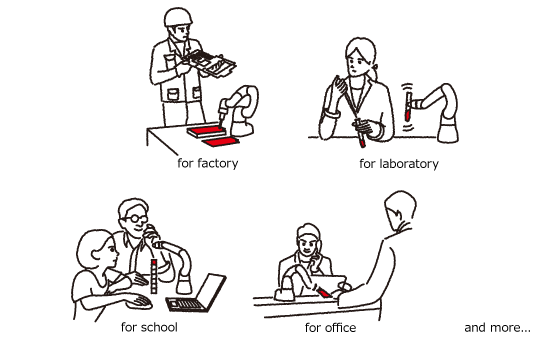
工場での部品の仕分けや、医薬品研究現場での正確な繰り返し作業、学校でのプログラミングの授業など、発想次第で、その活躍の仕方は無限に広がっていきます。

人と協働する存在として、その基本に求めたこと。それは「人へのやさしさ」です。鋭利な部分をつくらず、ユニークなアーム構造に加え、指を挟み込まないよう可動範囲も配慮。さらに、速度とトルクを監視する6つのセンサも内蔵し、機能的にも安全です。
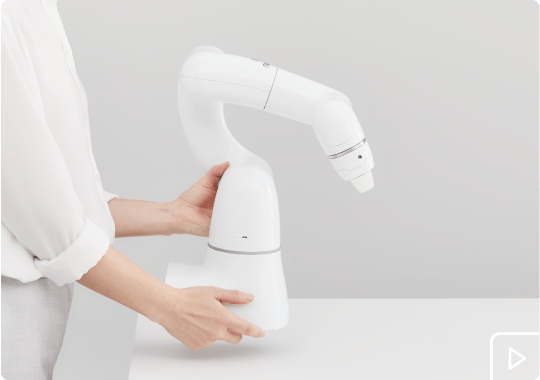
コントローラを内蔵しながらも、気軽に持ち運べる約4kg。COBOTTAは、小型・軽量なため、使いたいとき、使いたい場所で、すぐに作業を始められます。手が足りないときはもちろん、アイデアをすぐに実現したいとき、その小さな体が、とても大きな魅力です。

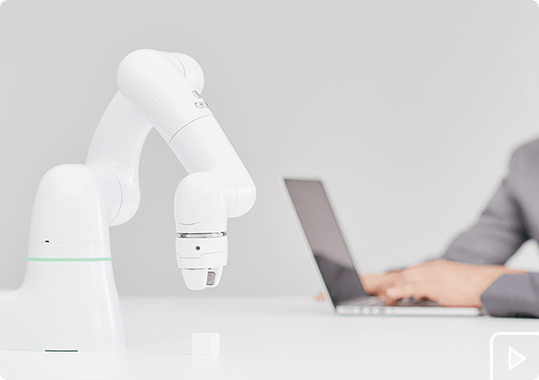
COBOTTAとの作業に、専門的な知識は必要ありません。アーム部を直接動かして動作を記憶させる「ダイレクトティーチング機能」をはじめ、直感的に使えるGUIや、カメラを用いたティーチング機能にも対応。これまでロボットになじみがなかった方でもすぐに使えます。
COBOTTAは、内蔵コントローラを開放し、制御用APIを公開しているため、クリエーターが自由な開発環境でオリジナルのアプリケーションを開発できます(※OSS版)。JavaやRubyなど様々な開発言語に対応し、接続可能なデバイスも多種多様。プロの要望にも十分に応える拡張性の高さを備えています。
2019年6月、産業用ロボットの安全性に関する4つの国際規格に基づく認証を取得しました。この認証は、国際的な第三者認証機関であるテュフ ラインランド ジャパン株式会社が、産業用ロボットの安全性に関して定められた規格に基づいてCOBOTTAの安全性を評価し、認証したものです。
詳細はこちらをご確認ください。


3色ボールペンミニ工場

ポータブル分注システム

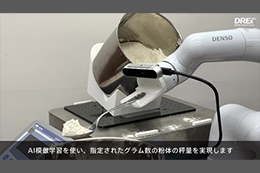
マルチモーダルAIによる塩の秤量

マルチモーダルAIによるブロックカー組立て

バタフライボード自動生産設備

Mindstormsによる制御

ラベル貼り

AIビジョンによる紅茶パックの箱詰め

ROSによる制御

分析作業の自動化

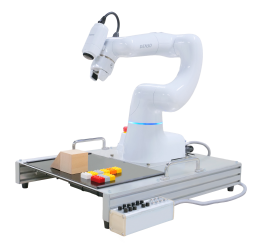
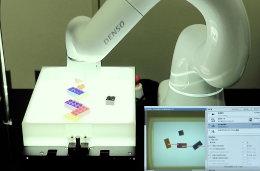
画像処理を用いた部品仕分け・タブレット操作・基盤検査
FPCコネクタ挿入の自動化

餃子の餡詰め工程

デンソー抹茶ロボット
| 軸数 | 6軸(アーム部)+1軸(電動グリッパ部)*1 |
|---|---|
| ブレーキ | 1、2、3、4、5軸ブレーキ付 |
| アーム長(第1アーム+第2アーム) | 342.5(165+177.5)mm |
| 定格可搬質量(最大可搬質量) | 0.5kg(手首下向き時±10度以内の場合は0.7kg)*2 |
| 最大許容慣性モーメント | J4:0.0065kgm2 J5:0.0047kgm2 J6:0.0012kgm2 |
| 位置繰返し精度 | ±0.05mm*3 |
| 標準サイクルタイム | 工場出荷時4.32sec、最大速度設定時1.6sec(水平200mm、垂直25mmの往復動作時間) |
| 保護等級 | COBOTTA本体:IP30 ACアダプタ、ACケーブル:IP20 |
| ソフトウェア | 標準版:COBOTTA専用ソフトウェア OSS版:なし(お客様にてLinuxなどをインストール可能) |
| 電源仕様(ACアダプタ) | 入力:単相AC100~240V±10%/47〜63Hz |
| 外部信号 | 入力 : 20点(汎用入力は8点、 専用入力は12点) 出力 : 20点(汎用出力は9点、 専用出力は11点) 外部非常停止用接続×1ch |
| 外部通信 | Ethernet×1回線、USB×2回線、VGA出力×1ch |
| 環境条件(動作時) | 温度0〜40℃、湿度20〜80%RH(結露なきこと) |
| 本体質量 | 約4kg |
| 安全仕様 | 標準版 ISO 10218-1:2011 ISO/TS 15066:2016 ISO 13849-1:2023 PL d, Cat.3 OSS版 ISO 13849-1:2023 PL d, Cat.3 |
| 騒音(等価騒音レベル(A特性)) | 55dB以下(定格負荷、工場出荷時の最高速度で測定) |
| 汚損度(汚染度) | 2 *4 |
| 過電圧カテゴリ | Ⅱ *5 |
| 標準 | |
|---|---|
| COBOTTA | ダウンロード |

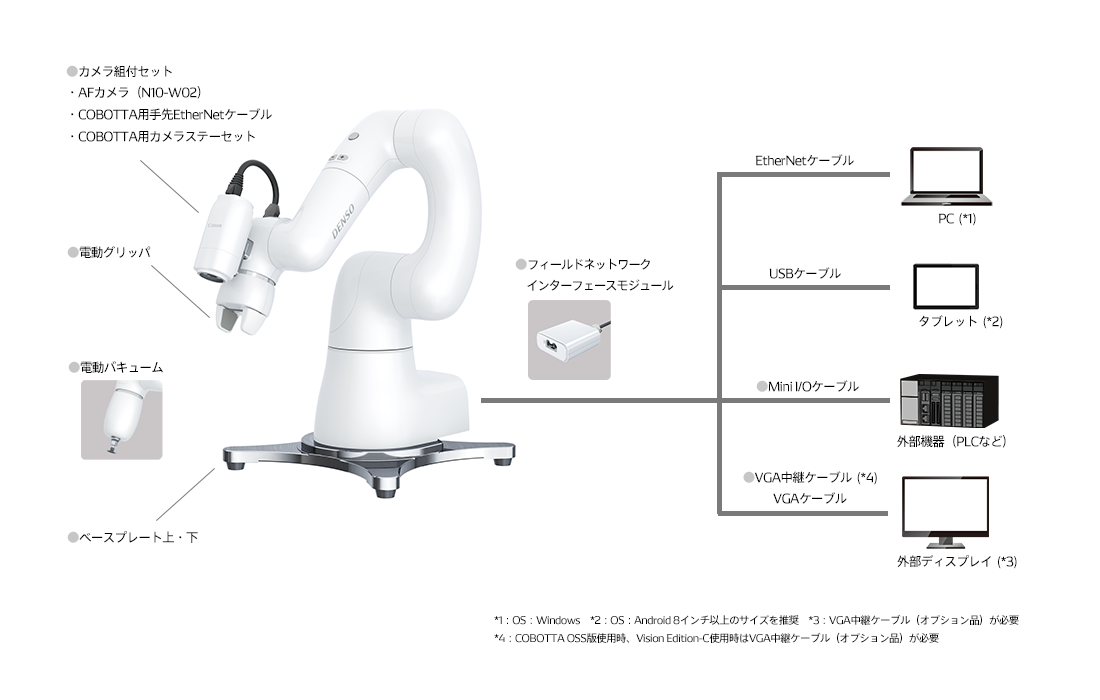

■電動グリッパ (*1)
「つかむ」「はなす」といった基本的な動作に適したハンド用ツールです。

■電動バキューム (*1)
外部にコンプレッサを用意することなく、簡単に吸着することができます。

■カメラ組付けセット (*1 *2)
ピント合わせ不要・最適露出が自動設定されるオートフォーカスカメラです。


■ベースプレート上・下
COBOTTAを固定せずに、自立で動作させるためのベースプレート。
上部・下部の2分割構造になっています。
■フィールドネットワークインターフェースモジュール
EtherCAT、EtherNet/IP、PROFINETが使えます。

■VGA中継ケーブル(*3)
外部のモニタと接続するため、市販のVGAケーブルと接続するケーブルです。

■Mini I/Oケーブル
COBOTTAと外部機器を接続する通信ケーブルです。

多くのお客様から、「実際に見て、触れて、体験したい」という声をいただいているCOBOTTA。
「刈谷FAセンター Robot@Home」内に設置された「オープンラボラトリー」では、購入前から、より具体的に工程内のどこで活用し、どう自動化していくかを検討することが可能になり、お客様が抱えている課題をCOBOTTAで解決する場として活用することができます。
アイデアやひらめきを形にするCOBOTTAの可能性を、ぜひ体験ください。
> 刈谷FAセンター Robot@Home

安全柵内で使用する従来の産業用ロボットとは異なり、人や物がロボットに接近しやすい環境では不意な接触事故による故障が増えてしまう恐れがあります。そこで通常の保証に加え、過失による修理にも対応した保守契約プランをご提供。
保守サービスのご提供は、ご購入いただいたCOBOTTAのシリアル番号とユーザー登録情報に基づいて行います。
迅速な保守サポートを提供するために、ユーザー登録をお願いいたします。
> COBOTTA® 年間保守契約プラン

人協働ロボットCOBOTTA専用のオーバーホールです。人協働ロボットならではの安全性・性能を維持するため、5年ごとに点検が必要です。
> COBOTTA® オーバーホール