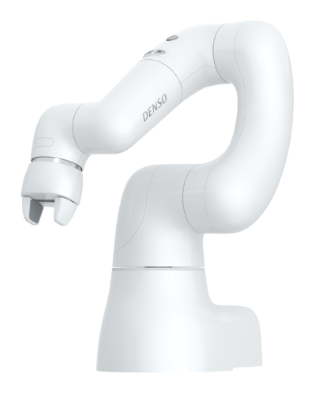
어디든지, 지금 바로, 간단히. 여러분과 함께 일하는 로봇.
자사 공장의 자동차부품제조 생산성 향상을 목표로 덴소 로봇의 개발을 시작한지 50년. 새롭게 내놓는 협동로봇 COBOTTA. 사람을 배려하는 구조와 운반하기 쉬운 작은 몸체. 어디든지 자유롭게 연결하여 움직이고, 바로 작업을 자동화한다. 그럼에도 전문지식 없이도 놀랄 정도 간단히. 손이 부족해 조금만 도와주었으면. 단순작업은 로봇에 맡기고, 좀 더 창조적인 일을 하고 싶다. 고객의 요구나 사용법에 따라 끝없이 무한한 가능성을 넓히는 COBOTTA. 그 상상은 끝이 없습니다.
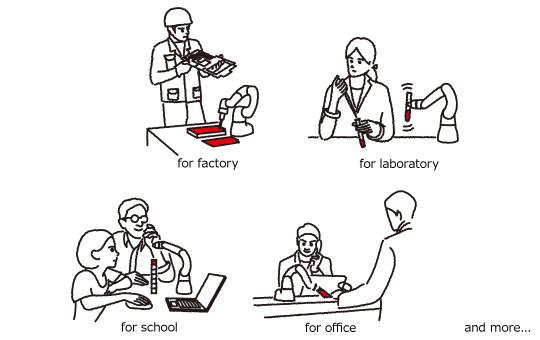
과제의 최적의 해결을 요구할 때, 아이디어를 실현하는 방법을 모색하고 있을 때, COBOTTA는 다양한 장면에서 우리를 지원합니다.
공장에서 부품 구분이나 의약품 연구 현상에서의 정확한 반복 작업, 학교에서의 프로그래밍 수업 등의 발상 시의 활약방식은 무한히 확장됩니다.

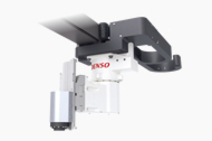
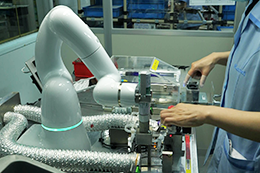
사람과 협동하는 존재로써, 그 기본에 추구함. 그것은 「사람을 배려」입니다. 예리한 부분을 없에 유니크한 암 구조로 손가락이 끼지 않는 가동범위도 배려. 또한, 속도와 토크를 감시하는 6개의 센서도 내장하여 기능적으로도 안전합니다.
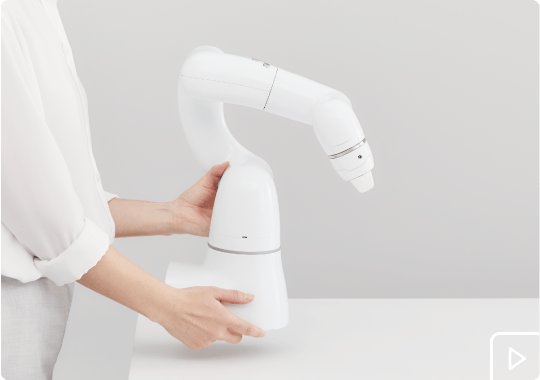
컨트롤러를 내장하고도 가볍게 운반할 수 있는 약 4kg. COBOTTA는 소형/경량으로 사용하고 싶을 때, 사용하고 싶은 장소에서 바로 작업을 시작할 수 있습니다. 일손이 부족한 경우는 물론 아이디어를 바로 실현하고자 할 때, 작은 본체는 매우 큰 매력입니다.

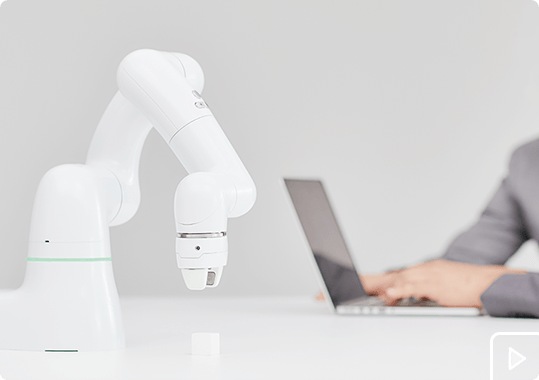
COBOTTA와의 작업은 전문적인 지식이 필요 없습니다‘ 로봇 팔을 직접 움직여 동작을 기억시키는 「다이렉트 티칭 기능」을 비롯하여 직감적으로 사용할 수 있는 GUI 나, 카메라를 이용한 티칭 기능에도 대응. 지금까지 로봇에 어려움이 있었던 분도 바로 사용할 수 있습니다.
COBOTTA는 내장 컨트롤러를 개방하여 제어용 API를 공개하고 있어 크리에이터가 자유로운 개발환경에서 오리지널 어플리케이션 개발이 가능합니다.(※ oss형). Java나 Rudy 등 다양한 개발언어에 대응하여 접속 가능한 디바이스도 다양함. 전문가(프로)의 요구에도 충분히 대응할 수 있는 높은 확장성을 가지고 있습니다.

| 축수 | 6축(암 부) + 1축(전원핸드부) (1) | |
|---|---|---|
| 구동모터/브레이크 | 모든 축 AC 서보 모터 / 1,2,3A,5축 브레이크 장착 | |
| 암길이 (저11암+제2암) | 342.5(165+177.5)mm | |
| 정격가반질량 (최대가반질량) | 0.5kg (핸드부 중력방향 시 土10도 이내 의 경우는 0.7kg) | |
| 최대속도 |
J1축: 23. 1 deg/sec
J2축: 22.47 deg/sec J3축: 41.58 deg/sec J4축: 42.35 deg/sec
J5축: 42.35 deg/sec
J6축: 63.56 deg/sec |
|
| 위치반복정밀도 | ±0.05mm(2) | |
| 합성최대속도 (T,。이선단면중심) | 공장출하 시 500mm/s (100·∼1500mm/s에서 최대속도를 설정 가능) | |
| 보호등급 | IP30 | |
| 소프트웨어 | 표준형 : COBOTTA전용 소프트웨어 oss형 , 없음(고객에서 Linux 등을 설치 가늠) | |
| 전원사양 (AC어댐터) | 입력 ; 단상 AC100-240V / 출력 : DC24V (약 180W) | |
| 외부신호 | 전용입력 ;12점/전용출력 10점 범용입력 8점/범용출력 10점 외부비상정지용 접속1x1ch | |
| 외부통신 | Ethernetx 1회선, U5Bx2회선, VGA출력x1ch | |
| 본체질량 | 약 4kg | |
| 안전사앙 | ISO 10218-1:2011 ISO/TS 15066 ISO 13849-1:2023 PL d, Cat. 3(※ 저13자 인증기관에 의한 인증취득 예정) |
|




덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)