

The robot features a rounded shape with few protrusions or indentations, reducing the level of risk posed by collisions. In addition, the robot’s joints are designed so that hands will not get caught between them.

| Function name | Description |
| Emergency Stop Function | Decelerates the robot until it stops, and then turns OFF the motor. The current program will be Reset-Stopped. |
| Protective Stop Function | The protective stop function is a function is to be connected to a signal from a safeguard or the like installed in the robot system/cell and stop the robot in response to the input signal. |
| Monitored-Speed Function | Monitors the robot speed to confirm if it does not exceed the specified speed. |
| Axis Limiting Function | Monitors the robot axes to confirm if they are not out of the specified motion range. |
| Monitored-Torque Function | Monitors the robot torque to confirm if it does not exceed the specified torque. |
| Monitored-Pose Function | Monitors the robot to confirm its pose remains unchanged from the specified pose. |
| Monitored Standstill Function | Monitors the robot to confirm if it remains stationary after having stopped with its motor ON. |
| General Safety Input/Output Function | Can be triggered by a signal input to a Safety I/O user input pin to which this function is allocated. |
| Safety Virtual Fence Function | Monitors the robot to confirm if it does not go beyond the motion range specified by a user. |
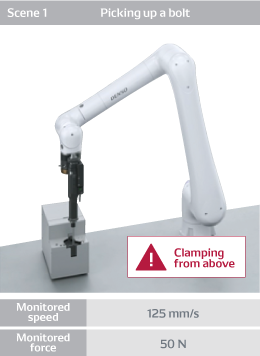



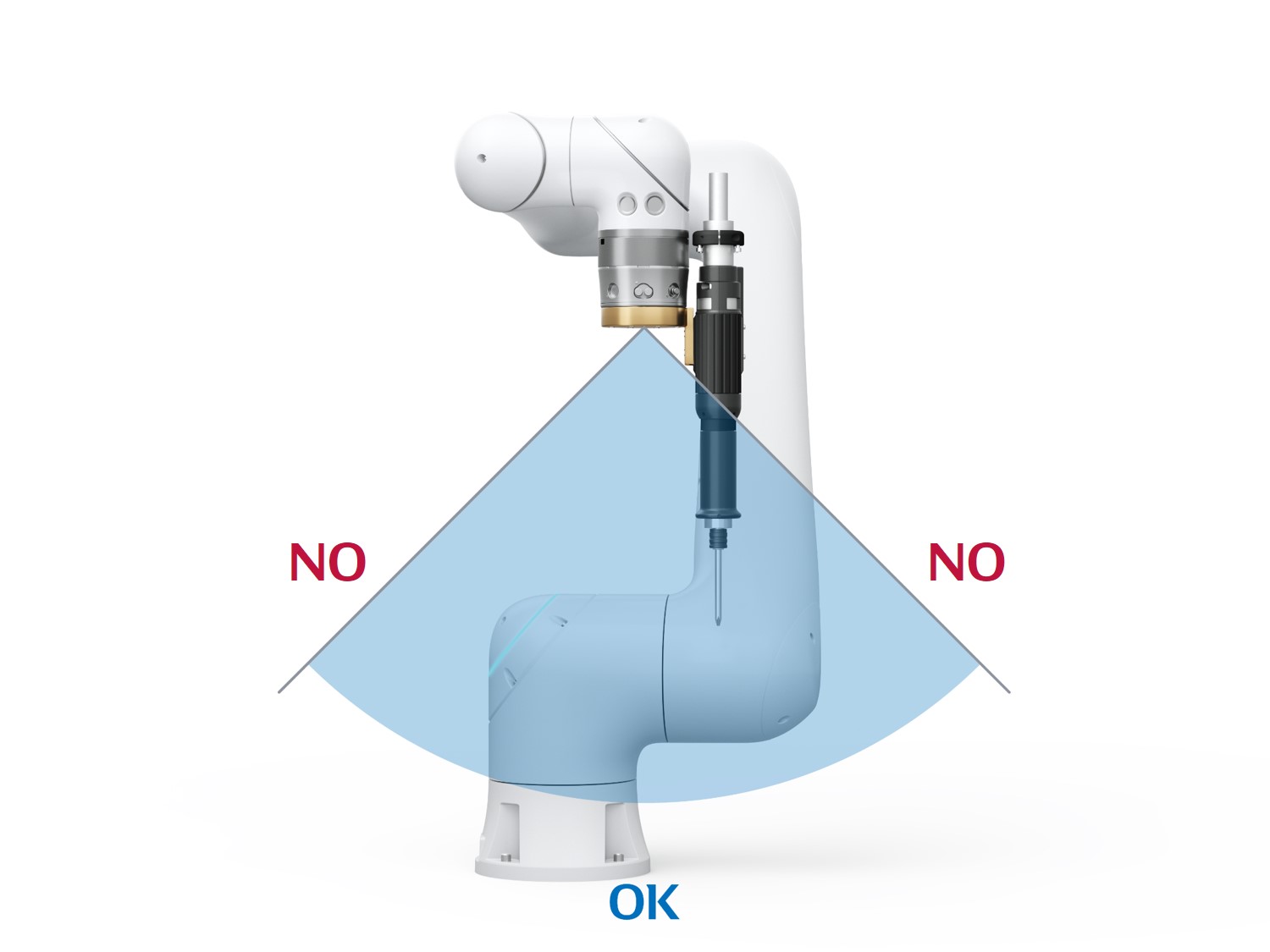
Robot-limited orientation (RLO) is a function for controlling the orientation of the end effector, combined with the scene function. COBOTTA PRO can avoid hazardous collisions with operators, simplifying risk assessment.
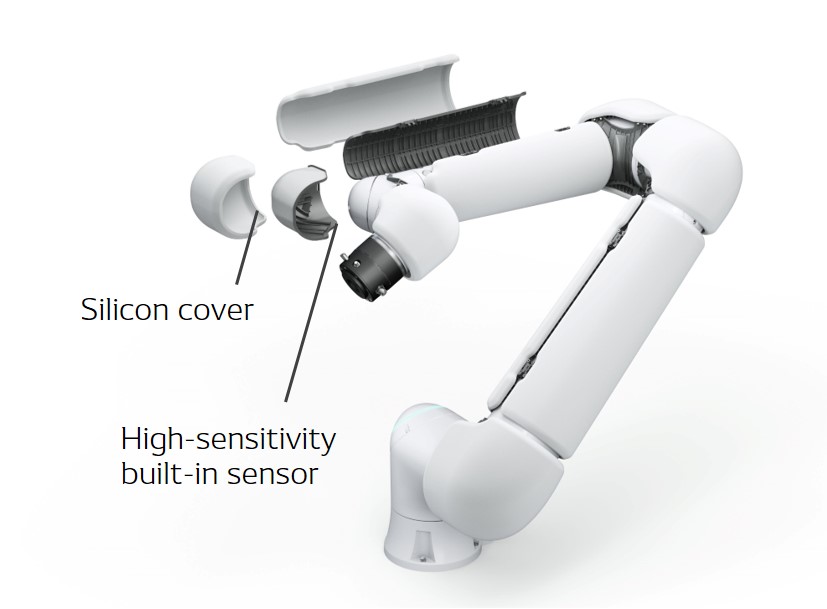
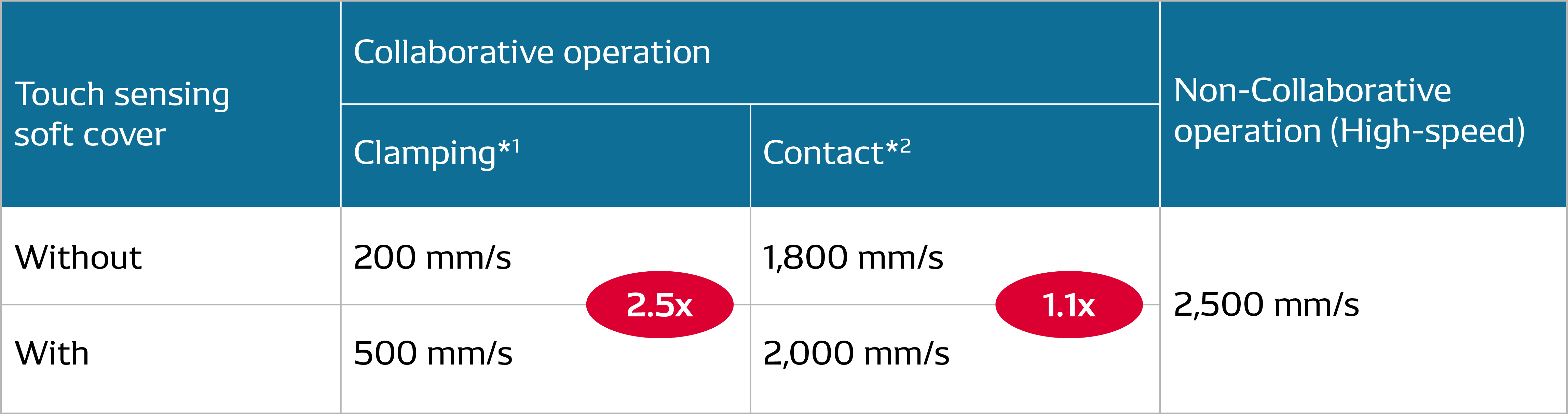
Our touch sensing soft cover is highly compact compared to general-purpose soft covers, even if covers are attached to all robot surfaces. The touch sensing soft cover features a two-layer design consisting of a soft silicon cover and a high-sensitivity built-in sensor. When a collision is detected, the built-in sensor reacts at high speed to immediately stop the robot. The soft cover minimizes the impact force on human workers by absorbing the collision. Protrusions in the silicon cover increase cushioning while realizing high sensitivity. As a result, installing the soft cover increases the speed of collaborative operation. Of course, the COBOTTA PRO is compliant as a collaborative robot with or without a soft cover.
We offer end effector covers in two sizes. Choose the one that best suits your end effector’s shape. While the RLO function is effective if there’s only one sharp area, you can avoid high-force collisions involving an end effector with numerous sharp areas by covering it with an end effector cover. The cover incorporates a contact sensor, allowing it to stop the robot if it detects a collision.






If you have not registered
The services on this member site are available only for registered customers.




































