COBOTTA PRO의 암은 요철이 적은 둥그스름한 설계로 되어 있으며, 만일의 충돌 시 위험을 저감하고 있습니다. 또한 로봇 관절부에 손이 말려들지 않는 구조로 되어 있습니다.

| 기능명 | 기능 개요 | 내용 |
| Safe Torque Off (STO) | 동력 즉시 차단(정지 카테고리 0) | 로봇의 동력을 차단합니다. |
| Safe Operating Stop (SOS) |
정지 감시 |
로봇의 정지 상태를 감시합니다. 로봇의 전력 공급은 유지됩니다. |
| Safe Output Control (SOC) | 안전 상태의 외부 출력 |
안전 상태를 출력합니다. |
| Safe Stop 1 (SS1) |
제어 정지 후 동력 차단(정지 카테고리 1) |
로봇 제어 정지 후 STO 상태로 이행합니다. |
| Safe Stop 2 (SS2) |
제어 정지 후 정지 감시(정지 카테고리 2) |
로봇 제어 정지 후 SOS 상태로 이행합니다. |
| Safety-Limited Speed (SLS) |
모터 속도 감시 |
각 축의 속도를 감시하는 기능입니다. 동작 속도가 설정 속도를 초과하지 않도록 제어됩니다. 설정 속도를 초과한 경우, SS1로 정지합니다. |
| Safety-Limited Position (SLP) |
모터 각도 감시 |
각 축의 동작 범위를 감시합니다. 설정 각도를 초과한 경우는 STO로 정지합니다. |
| Robot-Limited Speed (RLS) |
로봇 속도 감시 |
로봇의 속도를 감시합니다. 플랜지 중심이나 TCP, 암 상의 감시점 속도가 설정 속도를 초과하지 않도록 제어됩니다. 초과한 경우는 SS1로 정지합니다. |
| Robot-Limited Position (RLP) |
로봇 동작 범위 감시 |
로봇의 위치를 감시합니다. 플랜지 중심이나 TCP, 암 상의 감시점이 동작 영역 내로 제어됩니다. 초과한 경우는 STO로 정지합니다. |
| Robot-Limited Orientation (RLO) |
로봇 자세 감시 |
로봇의 손끝 자세를 감시합니다. 도구 자세가 제한 각도 이상으로 변화하지 않도록 로봇의 동작을 제한합니다. 초과한 경우는 SS1로 정지합니다. |
| Safety-Limited Torque (SLT) |
암 토크 감시 |
각 축의 토크를 감시합니다. 로봇 각 축의 토크가 설정한 값을 초과하지 않도록 제어합니다. 초과한 경우는 SS1로 정지합니다. |
| Robot-Limited Force (RLF) |
로봇의 힘 감시 |
로봇의 힘을 감시합니다. TCP에 가해지는 힘이 설정한 값을 초과하지 않도록 제한됩니다. 초과한 경우는 SS1로 정지합니다. |

로봇이 수평으로 이동하므로 측면에서 사람의 손에 충돌할 위험이 있습니다. 측면은 돌기한 부분이 없으므로 예를 들어 속도 제한이나 힘 제한을 완화하는 등 안전을 담보한 후 생산성을 높일 수 있습니다.

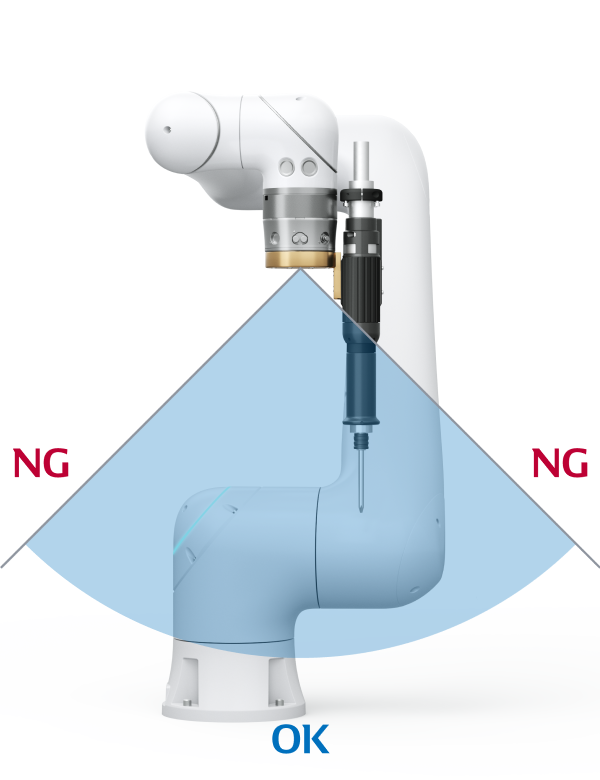
나사의 예리한 선단 방향으로 로봇이 움직입니다. 이로 인해 예리한 선단과설비 사이에 손이 끼일 위험이 있습니다. 그러므로 속도나 힘을 대폭 제한하는 파라미터로 전환하여 위험을 줄일 수 있습니다.

사람의 손가락이 들어갈 틈새가 없는 상태이므로 끼일 위험은 없습니다. 따라서 힘 제한을 완화하고 영역 제한을 나사 구멍 상공으로만 설정하면 안전을 담보하면서 나사 체결의 반력을 견딜 수 있는 설정을 만들어 넣을 수 있습니다.
RLO(Robot-limited Orientation) 기능이란 엔드 이펙터의 자세를 제어하는 기능입니다. 기존에 예리한 부분을 가진 엔드 이펙터를 장착하면 안전성을 증명하기 어렵다는 위험 평가상의 과제가 있었습니다. COBOTTA PRO에서는 RLO 기능과 장면 기능을 조합하여 로봇의 진행 방향과 엔드이펙터의 자세 제한을 연결하여 사람과의 위험한 충돌을 회피할 수 있어 위험 평가를 용이하게 합니다.
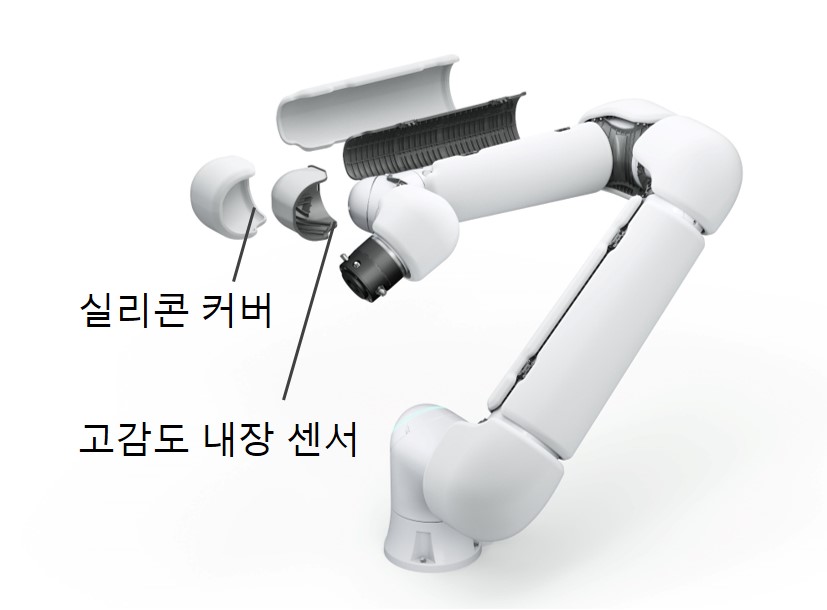
모두 장착해도 범용적인 소프트 커버에 비해 매우 슬림합니다. 부드러운 실리콘 부분과 고감도 내장 센서의 이중 구조로 되어 있습니다. 충돌을 검출하면 고속으로 내장 센서가 반응하여 로봇을 급정지시킵니다. 소프트 커버가 충격을 흡수하여 사람에 대한 충격력을 억제하는 구조입니다. 실리콘 부분에 돌기를 설치하여 고감도를 실현하면서 쿠션성을 높였습니다. 그 결과, 소프트 커버를 장착하면 협동 운전 시의 속도를 향상시킬 수 있습니다. 물론 COBOTTA PRO는 소프트 커버가 없는 상태에서도 협동 로봇으로 사용할 수 있습니다.

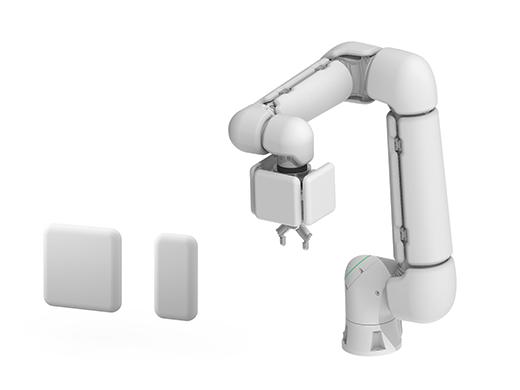
엔드 이펙터용 커버는 크기가 다른 2종류가 준비되어 있습니다. 엔드 이펙터 형상에 맞춰 사용할 수 있습니다. 예리한 부분이 하나라면 RLO 기능이 유효하지만, 예리한 부분이 많을 경우는 엔드 이펙터용 커버로 덮으면 고압력에서의 충돌을 회피할 수 있습니다. 접촉 센서가 탑재되어 있으므로 충돌을 감지하고 로봇을 정지시킬 수 있습니다.



덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)