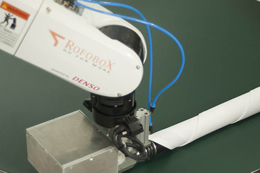
Speedy start, speedy continuation of motion, and accurate stopping.
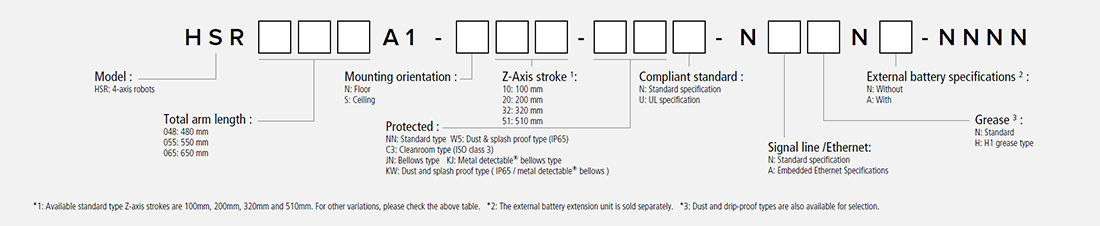
Total arm length|480 / 550 / 650 mm
Vertical stroke(Z)|100 / 200 / 320 / 510 mm
Maximum payload|8kg
Cycle time|0.28 / 0.31 sec
Sometimes, the performance of a robot cannot be known only from its specifications. You may not be confident whether it can complete the motion within the listed cycle time, or whether it can actually continue its motion. To address those challenges, we have pursued the basic performances of robots—quick acceleration; runs continuously at high speed; stops precisely—that have been requested from fields to the utmost limits, and have developed new high-speed SCARA robots, the HSR Series, that can achieve "True high-speed performance." As a result of pursuing high-speed performance, high-speed picking systems can be realized with small, space-saving robots not only in conventional parts assembly processes, but also in packaging processes of food, medical supplies, and cosmetics, which is bringing about a revolution in performance.

High acceleration & motion profiles.
Improved CPM (cycle per minute) allows the robot to
move at high speed continuously.

Achieving Non-Stop continuous motion.
Improved heat dissipation performance at the base unit allows the robot to achieve continuous motion, which is required in actual processes.
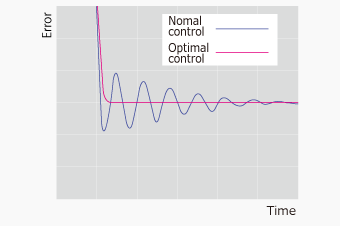
The robot can suppress vibrations in a short time by actively reflecting the status of the arm to vibration control. This can suppress vibrations that occur with high-speed transfer and residual vibrations, reducing the cycle time.
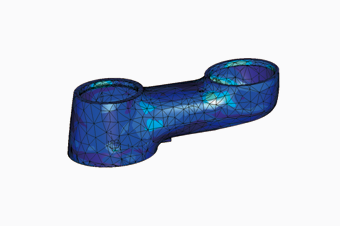
Newly designed, highly rigid,lightweight arm.
The combination of between high rigidity and light weight allows the robot to achieve a high payload (8kg) and high-speed motion at the same time.

The mounting direction can be switched.
Floor and ceiling mount models available.

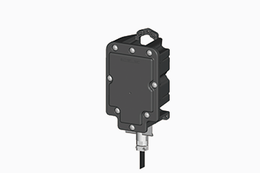
A large-capacity motor is integrated into the base unit. Weight reduction at the tip of the arm and optimized arm structure allow the robot to improve its high-speed performance.


| Item | Unit | HSR048 | HSR055 | HSR065 | |
|---|---|---|---|---|---|
| Overall arm length (first arm + second arm) | mm | 480 | 550 | 650 | |
| 1st arm | mm | 205 | 275 | 375 | |
| 2nd arm | mm | 275 | 275 | 275 | |
| Z-axis stroke | mm | 100/200/320 | |||
| payload | kg | 8 | |||
| Mounting orientation | - | Floor-mount / Overhead-mount | |||
| Position repeatability(at the center of an end-effector mounting face(1)) | J1+J2 | mm | ±0.01 | ±0.012 | ±0.012 |
| Z | mm | ±0.01 | ±0.01 | ±0.01 | |
| T | deg | ±0.004 | ±0.004 | ±0.004 | |
| HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | ||
|---|---|---|---|---|
| Overall arm length | 205 (J1: 1st axis)+275 (J2: 2nd axis)=480mm | 275 (J1: 1st axis)+275 (J2: 2nd axis)=550mm | 375 (J1: 1st axis)+275 (J2: 2nd axis)=650mm | |
| Motion angle and stroke | J1 (1st axis) | ±130° | ||
| J2 (2nd axis) | ±143.5° | ±150° | ||
| Z (3rd axis)(*) | *=10:100mm *=20:200mm *=32:320mm *=51:510mm |
*=10:100mm *=20:200mm *=32:320mm *=51:510mm |
*=10:100mm *=20:200mm *=32:320mm *=51:510mm |
|
| T (4th axis) | ±360° | |||
| Axis combination | J1 (1st axis)+J2 (2nd axis)+Z (3rd axis)+T (4th axis) | |||
| Maximum payload | 8kg | |||
| Maximum composite speed | At the center of the hand mounting flange | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z and T | Z (3rd axis): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2,475mm/s T (4th axis):2,500°/s |
Z (3rd axis): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2,475mm/s T (4th axis):2,500°/s |
Z (3rd axis): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2.475mm/s T(4th axis):2,500°/s |
|
| Position repeatability (Value at the constant ambient temperature.) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| Maximum force-fit | 98N (1 second or less) | |||
| Maximum allowable inertia moment | 0.12kgm2 | |||
| Position detection | Absolute encoder | |||
| Drive motor and brake | AC servomotors for all axes Brakes for Z axis (3rd axis) and T axis (4th axis) | |||
| Brake releasing | Models except UL-Listed ones |
|
||
| UL-Listed models |
|
|||
| User air piping | 4 systems (φ4×2、φ6×2) | |||
| User signal lines | ・19 (for proximity sensor signals, etc.) ・Ethernet(8)(1) |
|||
| Air source | Operating pressure | 0.05~0.35MPa | ||
| Max. allowable pressure | 0.59MPa | |||
| Airborne noise (A-weighted equivalent continuous sound pressure level) | 80dB or less | |||
| Weight(2) | Approximately 31 kg (68.4 lb) | Approximately 31.5 kg (69.5 lb) | Approximately 32 kg (70.6 lb) | |
| HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | ||
|---|---|---|---|---|
| Overall arm length | 205 (J1: 1st axis)+275 (J2: 2nd axis)=480mm | 275 (J1: 1st axis) +275 (J2: 2nd axis) =550mm | 375 (J1: 1st axis) +275 (J2: 2nd axis) =650mm | |
| Motion angle and stroke | J1 (1st axis) | ±130° | ||
| J2 (2nd axis) | ±143.5° | ±150° | ||
| Z (3rd axis)(*) | *=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
|
| T (4th axis) | ±360° | |||
| Axis combination | J1 (1st axis)+J2 (2nd axis)+Z (3rd axis)+T (4th axis) | |||
| Maximum payload | 8kg | |||
| Maximum composite speed | At the center of the hand mounting flange | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z and T | Z (3rd axis): 170mm:2,250mm/s 290mm:2,475mm/s T(4th axis):2,500°/s |
Z (3rd axis): 170mm:2,250mm/s 290mm:2,475mm/s T (4th axis):2,500°/s |
Z (3rd axis): 170mm:2,250mm/s 290mm:2,475mm/s T(4th axis):2,500°/s |
|
| Position repeatability (Value at the constant ambient temperature.) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| Maximum force-fit | 98N (1second or less) | |||
| Maximum allowable inertia moment | 0.12kgm2 | |||
| Position detection | Absolute encoder | |||
| Drive motor and brake | AC servomotors for all axes Brakes for Z axis (3rd axis) and T axis (4th axis) | |||
| Brake releasing | Models except UL-Listed ones |
|
||
| UL-Listed models |
|
|||
| User air piping | 4 systems (φ4×2、φ6×2) | |||
| User signal lines | ・19 (for proximity sensor signals, etc.) ・Ethernet(8)(1) |
|||
| Air source | Operating pressure | 0.05~0.35MPa | ||
| Max. allowable pressure | 0.59MPa | |||
| Airborne noise (A-weighted equivalent continuous sound pressure level) | 80dB or less | |||
| Weight(2) | Approximately 31 kg (68.4 lb) | Approximately 31.5 kg (69.5 lb) | Approximately 32 kg (70.6 lb) | |
| Type | Total arm length | Specifications |
|---|---|---|
| Floor-mount | Common | Standard/Bellows/UL |
| Overhead-mount | Standard/Bellows/UL |







If you have not registered
The services on this member site are available only for registered customers.