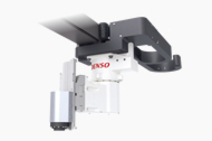
빠르게 움직이기 시작한다. 빠르게 움직임을 계속한다. 정확하게 멈춘다.
암 길이|480・550・650mm
상하 스트로크|100・200・320・510mm
최대 가반 질량|8kg
표준 사이클 타임|0.28・0.31초
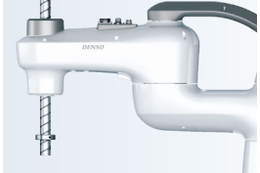
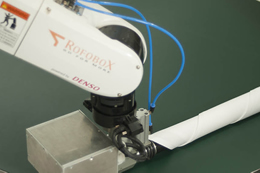
로봇의 성능은 카탈로그 수치만으로는 알 수 없는 경우가 있습니다. 사이클 타임 내로 들어오는지, 정말로 계속해서 움직이는지, 판단할 수 없을 때가 있습니다. 그러한 과제를 해결하기 위하여, 「빠르게 움직이기 시작한다」, 「빠르게 움직임을 계속한다」, 「정확하게 멈춘다」라는 현장에서 끊임없이 요구되고 있는 이런 기본 성능을 극한까지 추구하여 「진정한 고속성」을 실현한 것이 바로 신형 고속 스카라로봇 HSR 시리즈입니다. 고속성을 추구한 결과, 기존의 부품 조립에서부터 식품·의약품·화장품 등의 패키지 공정에서까지도 소형 및 공간절약과 고속 피킹 시스템을 실현하여, 현장에 혁신을 일으킵니다.

클래스 최고 수준의 고속동작을 실현. CPM(Cycle Per Minute = 1분간 동작량)의 향상으로, 고속 및 장시간의 동작이 가능.

장시간의 연속 가동을 실현. 베이스부의 방열성의 향상으로, 실제 공정에서 요구되는 오랜 시간동안 계속되는 가동성을 구현.
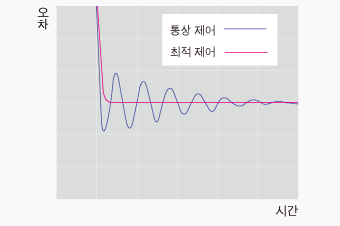
진동을 억제하는 기술. 암의 상태를 동적으로 제어에 반영함으로써 로봇을 단시간에 제진. 고속 반송 시의 진동이나 잔류진동을 억제하여, 사이클 타임을 단축.
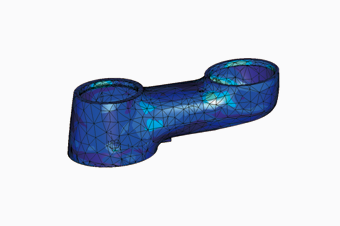
새로운 설계, 고강성 및 경량화한 암. 고강성과 경량화를 모두 만족시킴으로써, 높은 가반하중(8kg)과 고속 동작을 실현.

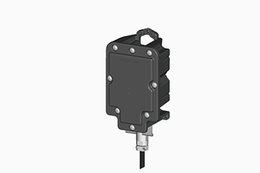
샤프트의 반전으로 설치방향의 전환이 가능. 바닥형 타입, 천정형 타입을 선택할 수 있음.(※취부 타입 변경은 별도 문의해 주십시오.)

대용량 모터를 베이스 유닛으로 통합하여 암 끝부분의 경량화와 암 구조의 최적화에 의해 고속성을 향상.
옵션



| 항목 | 단위 | HSR048 | HSR055 | HSR065 | |
|---|---|---|---|---|---|
| 암 전장(제1암+제2암) | mm | 480 | 550 | 650 | |
| 제1암 | mm | 205 | 275 | 375 | |
| 제2암 | mm | 275 | 275 | 275 | |
| Z축 스트로크 | mm | 100/200/320 | |||
| 가반질량 | kg | 8 | |||
| 설치방식 | - | 바닥 설치 타입/천장 설치 타입 | |||
| 위치반복 정밀도(툴 장착면 중심(1)) | J1+J2 | mm | ±0.01 | ±0.012 | ±0.012 |
| Z | mm | ±0.01 | ±0.01 | ±0.01 | |
| T | deg | ±0.004 | ±0.004 | ±0.004 | |
| HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | ||
|---|---|---|---|---|
| 암 전장 | 205 (J1:제1암)+275 (J2:제2암)=480mm | 275 (J1:제1암)+275 (J2:제2암)=550mm | 375 (J1:제1암)+275 (J2:제2암)=650mm | |
| 동작각도 및 스트로크 | J1 (제1축) | ±130° | ||
| J2 (제2축) | ±143.5° | ±150° | ||
| Z (제3축)(*) | *=10:100mm *=20:200mm *=32:320mm *=51:510mm |
*=10:100mm *=20:200mm *=32:320mm *=51:510mm |
*=10:100mm *=20:200mm *=32:320mm *=51:510mm |
|
| T (제4축) | ±360° | |||
| 축 조합 | J1 (제1축)+J2 (제2축)+Z (제3축)+T (제4축) | |||
| 최대 가반질량 | 8kg | |||
| 합성 최대속도 | 암 선단 | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z 및 T | Z (제3축): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2,475mm/s T (제4축):2,500°/s |
Z (제3축): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2,475mm/s T (제4축):2,500°/s |
Z (제3축): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2.475mm/s T(제4축):2,500°/s |
|
| 위치반복 정밀도(주위 온도 일정) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| 최대압 입력(하방향) | 98N (1초간 이하) | |||
| 최대 허용 관성 모멘트 | 0.12kgm2 | |||
| 위치검출 방식 | Absolute 인코더 | |||
| 구동모터, 브레이크 | 모든 축 AC 서보 모터+ Z축、T축:브레이크 부착 | |||
| 브레이크 해제 조작 | UL사양 이외 |
|
||
| UL사양 |
|
|||
| 사용자용 에어배관 | 4계통 (φ4×2、φ6×2) | |||
| 사용자용 신호선 | ・19심(근접센서 등의 신호선) ・Ethernet(8)(1) |
|||
| 에어원 | 상용 압력 | 0.05~0.35MPa | ||
| 허용 최대압력 | 0.59MPa | |||
| 공기전파소음 (A 가중 등가 지속 음압 레벨) |
80dB이하 | |||
| 질 량(2)약 | 31 kg (약68.4 lb) | 약31.5 kg (약69.5 lb)약 | 32 kg (약70.6 lb) | |
| HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | ||
|---|---|---|---|---|
| 암 전장 | 205 (J1:제1암)+275 (J2:제2암)=480mm | 275 (J1:제1암) +275 (J2:제2암) =550mm | 375 (J1:제1암) +275 (J2:제2암) =650mm | |
| 동작각도 및 스트로크 | J1 (제1축) | ±130° | ||
| J2 (제2축) | ±143.5° | ±150° | ||
| Z (제3축)(*) | *=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
|
| T (제4축) | ±360° | |||
| 축 조합 | J1 (제1축)+J2 (제2축)+Z (제3축)+T (제4축) | |||
| 최대 가반질량 | 8kg | |||
| 합성 최대속도 | 암 선단 | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z 및 T | Z (제3축): 170mm:2,250mm/s 290mm:2,475mm/s T(제4축):2,500°/s |
Z (제3축): 170mm:2,250mm/s 290mm:2,475mm/s T (제4축):2,500°/s |
Z (제3축): 170mm:2,250mm/s 290mm:2,475mm/s T(제4축):2,500°/s |
|
| 위치반복 정밀도(주위 온도 일정) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| 최대압 입력(하방향) | 98N (1초간 이하) | |||
| 최대 허용 관성 모멘트 | 0.12kgm2 | |||
| 위치검출 방식 | Absolute 인코더 | |||
| 구동모터, 브레이크 | 모든 축 AC 서보 모터 Z축、T축:브레이크 부착 | |||
| 브레이크 해제 조작 | UL사양 이외 |
|
||
| UL사양 |
|
|||
| 사용자용 에어배관 | 4계통 (φ4×2、φ6×2) | |||
| 사용자용 신호선 | ・19심 (근접센서 등의 신호선) ・Ethernet(8)(1) |
|||
| 에어원 | 상용 압력 | 0.05~0.35MPa | ||
| 허용 최대압력 | 0.59MPa | |||
| 공기전파소음 (A 가중 등가 지속 음압 레벨) |
80dB이하 | |||
| 질 량(2) | 약31 kg (약68.4 lb) | 약31.5 kg (약69.5 lb) | 약32 kg (약70.6 lb) | |
| 타입 | 암 길이 | 사양 |
|---|---|---|
| 바닥 설치 타입 | 공통 | 표준/주름 부분/UL |
| 천장 설치 타입 | 표준/주름 부분/UL |





덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)