The compact and slim body has outstanding high power and speed.
Maximum arm reach|653 / 854mm
Maximum payload|7kg
Cycle time|0.49 / 0.59 sec
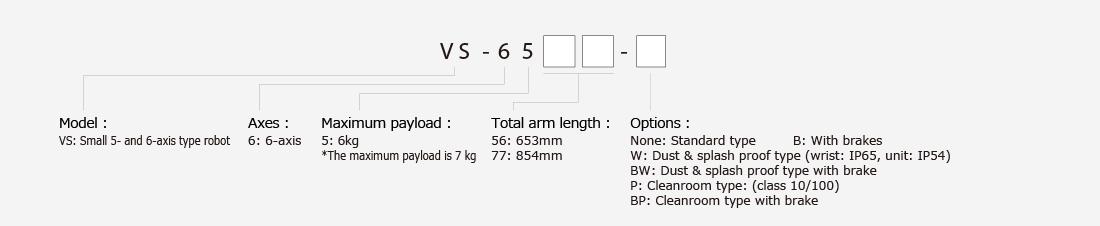
With a maximum payload of 7 kg (wrist orientation: ±45 degrees max. with respect to the downward vertical direction)*1, the VS-6556 and the VP-6577 are very powerful for their small size, allowing greater flexibility of hand design.
With a small arm width of 110 mm, the VS-6556 and the VP-6577 can reduce interference with other facilities.
The footprint is only 200 mm x 200 mm. The entire body fits into an area of two standard postcards, helping size reduction of facilities.
The dust-proof, mist-proof type, which can be used under severe use conditions, and the clean type, which is perfect for automatization of clean rooms.
| Maximum arm reach | Brake |
Standard type |
Dust- & splash-proof type [wrist:IP65、 Robot Unit:Equivalent to IP54] |
Clean room type(*2) [Clean level: class10(0.1μm) class100(0.3μm)] |
|---|---|---|---|---|
| 650mm |
Standard type:2・3・4-axisWith Brakes |
VS-6556 | VS-6556-W | VS-6556-P |
| 850mm | VS-6577 | VS-6577-W | VS-6577-P | |
| 650mm | Expansion: Brakes for all joints (not contained in 1-axis) |
VS-6556-B | VS-6556-BW | VS-6556-BP |
| 850mm | VS-6577-B | VS-6577-BW | VS-6577-BP |
| Item | Standard type | Standard type / With brakes | |||
|---|---|---|---|---|---|
| Model name of robot unit | VS-6556 | VS-6577 | VS-6556-B | VS-6577-B | |
| Axes | 6 | ||||
| Overall arm length | 270(first arm)+ 295(second arm)=565mm |
365(first arm)+ 405(second arm)=770mm |
270(first arm)+ 295(second arm)=565mm |
365(first arm)+ 405(second arm)=770mm |
|
| Arm offset | J1(swing):75mm J3(front arm):90mm | ||||
| Maximum motion area | R=733mm(end-effector mounting face) R=653mm (Point P: J4, J5, J6 center) |
R=934mm(end-effector mounting face) R=854mm (Point P: J4, J5, J6 center) |
R=733mm(end-effector mounting face) R=653mm (Point P: J4, J5, J6 center) |
R=934mm(end-effector mounting face) R=854mm (Point P: J4, J5, J6 center) |
|
| Motion range | J1:±170°, J2:+135°, -100°, J3:+166°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+169°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+166°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+169°, -119°, J4:±190°, J5:±120°, J6:±360° |
|
| Maximum payload | 7kg(Within a downward wrist angle of movement of ±45°) (※4) | ||||
| Maximum composite speed | 8200mm/s (at the center of an end-effector mounting face) |
7600mm/s (at the center of an end-effector mounting face) |
8200mm/s (at the center of an end-effector mounting face) |
7600mm/s (at the center of an end-effector mounting face) |
|
| Cycle time(※1) | Approx. 0.4(sec) | Approx. 0.5(sec) | Approx. 0.4(sec) | Approx. 0.5(sec) | |
| Position repeatability(※2) | In each of X, Y and Z directions:±0.02mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.03mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.02mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.03mm (at the center of an end-effector mounting face) |
|
| Maximum allowable inertia moment | Around J4 and J5:0.41kgm2 Around J6:0.063kgm2 (7kg payload) | ||||
| Position detection | Absolute encoder | ||||
| Drive motor and brake | AC servomotors for all joints, Brakes for joints J2 to J4 | AC servomotors for all joints, Brakes for joints J2 to J6 | |||
| Brake releasing | Enter a brake release command with the teach pendant or mini-pendant. | ||||
| User air piping(※3) | 7 systems(φ4x6、φ6x1) 3 solenoid valves (2-position, double solenoid) contained. |
||||
| User signal line | 10(for proximity sensor signals, etc.) | ||||
| Air source | Operating pressure | 1.0×105Pa - 3.9×105Pa | |||
| Maximum allowable pressure | 4.9×105Pa | ||||
| Degree of protection | IP40 | ||||
| Airborne noise | 80dB or less(A-weighted equivalent continuous sound pressure level) | ||||
| Weight | Approx. 35kg (77lb) | Approx. 36kg (80lb) | Approx. 35kg (77lb) | Approx. 36kg (80lb) | |
| Item | Dust- & splash- proof type | Dust- & splash- proof type / With brakes | |||
|---|---|---|---|---|---|
| Model name of robot unit | VS-6556-W | VS-6577-W | VS-6556-BW | VS-6577-BW | |
| Axes | 6 | ||||
| Overall arm length | 270(first arm)+ 295(second arm)=565mm |
365(first arm)+ 405(second arm)=770mm |
270(first arm)+ 295(second arm)=565mm |
365(first arm)+ 405(second arm)=770mm |
|
| Arm offset | J1(swing):75mm J3(front arm):90mm | ||||
| Maximum motion area | R=733mm(end-effector mounting face) R=653mm (Point P: J4, J5, J6 center) |
R=934mm(end-effector mounting face) R=854mm (Point P: J4, J5, J6 center) |
R=733mm(end-effector mounting face) R=653mm (Point P: J4, J5, J6 center) |
R=934mm(end-effector mounting face) R=854mm (Point P: J4, J5, J6 center) |
|
| Motion range | J1:±170°, J2:+135°, -100°, J3:+166°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+169°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+166°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+169°, -119°, J4:±190°, J5:±120°, J6:±360° |
|
| Maximum payload | 7kg(Within a downward wrist angle of movement of ±45°) (※4) | ||||
| Maximum composite speed | 8200mm/s (at the center of an end-effector mounting face) |
7600mm/s (at the center of an end-effector mounting face) |
8200mm/s (at the center of an end-effector mounting face) |
7600mm/s (at the center of an end-effector mounting face) |
|
| Cycle time(※1) | Approx. 0.4(sec) | Approx. 0.5(sec) | Approx. 0.4(sec) | Approx. 0.5(sec) | |
| Position repeatability(※2) | In each of X, Y and Z directions:±0.02mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.03mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.02mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.03mm (at the center of an end-effector mounting face) |
|
| Maximum allowable inertia moment | Around J4 and J5:0.413kgm2 Around J6:0.063kgm2 (7kg payload) | ||||
| Position detection | Absolute encoder | ||||
| Drive motor and brake | AC servomotors for all joints, Brakes for joints J2 to J4 | AC servomotors for all joints, Brakes for joints J2 to J6 | |||
| Brake releasing | Enter a brake release command with the teach pendant or mini-pendant. | ||||
| User air piping(※3) | 7 systems(φ4x6,φ6x1)Solenoid Valve(2Position, Double Solenoids)×3 | ||||
| User signal line | 10(for proximity sensor signals, etc.) | ||||
| Air source | Operating pressure | 1.0×105Pa - 3.9×105Pa | |||
| Maximum allowable pressure | 4.9×105Pa | ||||
| Degree of protection | IP54(Wrist:IP65) | ||||
| Airborne noise | 80dB or less(A-weighted equivalent continuous sound pressure level) | ||||
| Weight | Approx. 35kg(Approx. 77lb) | Approx. 36kg(Approx. 80lb) | Approx. 35kg(Approx. 77lb) | Approx. 36kg(Approx. 80lb) | |
| Item | Clean room type | Clean room type / With brakes | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Model name of robot unit | VS-6556 -P10 |
VS-6556 -P100 |
VS-6577 -P10 |
VS-6577 -P100 |
VS-6556 -BP10 |
VS-6556 -BP100 |
VS-6577 -BP10 |
VS-6577 -BP100 |
|
| Axes | 6 | ||||||||
| Overall arm length | 270(first arm) +295(second arm)=565mm |
365(first arm) +405(second arm)=770mm |
270(first arm) +295(second arm)=565mm |
365(first arm) +405(second arm)=770mm |
|||||
| Arm offset | J1(swing):75mm J3(front arm):90mm | ||||||||
| Maximum motion area | R=733mm(end-effector mounting face) R=653mm (Point P: J4, J5, J6 center) |
R=934mm(end-effector mounting face) R=854mm (Point P: J4, J5, J6 center) |
R=733mm(end-effector mounting face) R=653mm (Point P: J4, J5, J6 center) |
R=934mm(end-effector mounting face) R=854mm (Point P: J4, J5, J6 center) |
|||||
| Motion range | J1:±170°, J2:+135°, -100°, J3:+166°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+169°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+166°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+169°, -119°, J4:±190°, J5:±120°, J6:±360° |
|||||
| Maximum payload | 7kg(Within a downward wrist angle of movement of ±45°)(※4) | ||||||||
| Maximum composite speed | 8200mm/s (at the center of an end-effector mounting face) |
7600mm/s (at the center of an end-effector mounting face) |
8200mm/s (at the center of an end-effector mounting face) |
7600mm/s (at the center of an end-effector mounting face) |
|||||
| Cycle time(※1) | Approx. 0.4(sec) | Approx. 0.5(sec) | Approx. 0.4(sec) | Approx. 0.5(sec) | |||||
| Position repeatability(※2) | In each of X, Y and Z directions:±0.02mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.03mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.02mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.03mm (at the center of an end-effector mounting face) |
|||||
| Maximum allowable inertia moment | Around J4 and J5:0.413kgm2 Around J6:0.063kgm2 (7kg payload) | ||||||||
| Position detection | Absolute encoder | ||||||||
| Drive motor and brake | AC servomotors for all joints, Brakes for joints J2 to J4 | AC servomotors for all joints, Brakes for joints J2 to J6 | |||||||
| User air piping(※3) | 6 systems(φ4×6) Solenoid Valve(2Position, Double Solenoids)×3 | ||||||||
| User signal line | 10(for proximity sensor signals, etc.) | ||||||||
| Air source | Operating pressure | 1.0×105Pa - 3.9×105Pa | |||||||
| Maximum allowable pressure | 4.9×105Pa | ||||||||
| Degree of protection | Class 10(0.1μ) | Class 100(0.3μ) | Class 10(0.1μ) | Class 100(0.3μ) | Class 10(0.1μ) | Class 100(0.3μ) | Class 10(0.1μ) | Class 100(0.3μ) | |
| Airborne noise | 80dB or less(A-weighted equivalent continuous sound pressure level) | ||||||||
| Weight | Approx. 35kg (Approx. 77lb) | Approx. 36kg (Approx. 80lb) | Approx. 35kg (Approx. 77lb) | Approx. 36kg (Approx. 80lb) | |||||
| Group | Item | Q'ty |
|---|---|---|
| Robot & Accessories | Robot unit | 1 |
| Motor & encoder cable (option) | 1 | |
| Sheet of direction indicator labels | 1 | |
| Connector set for hand control signals (for CN20 and CN21) | 1set | |
| Dowel pins (internally threaded positioning pin and diamond-shaped pin) | 1set | |
| Controller & Accessories | Robot controller | 1 |
| Power cable (5 m) | 1 | |
| Pendantless connector (Dummy connector) | 1 | |
| Cable clamp | 1 | |
| Software etc | WINCAPS III trial version installer disc | 1 |
| Manuals ("Manual Pack disc" and "Safety Precautions") | 1set | |
| Warning label | 1 |
| Type | Item | ||
|---|---|---|---|
| I/O cables | Standard I/O cable set | Consisting of 8-m I/O cables for "Mini I/O" and "HAND I/O." |
|
|
Consisting of 15-m I/O cables for
"Mini I/O" and "HAND I/O."
|
|||
| I/O cable for "Mini I/O" (68 pins) | 8 m | ||
| 15 m | |||
| I/O cable for "HAND I/O" (20 pins) | 8 m | ||
| 15 m | |||
| I/O cable for "Parallel I/O board" (96 pins) | 8 m | ||
| 15m | |||
| Operation devices | Teaching pendant | With 4 m cable | |
| With 8 m cable | |||
| With 12 m cable | |||
| Mini-pendant kit (Incl. WINCAPS III Light version) |
With 4 m cable | Japanese language version | |
| English language version | |||
| With 8 m cable | Japanese language version | ||
| English language version | |||
| With 12 m cable | Japanese language version | ||
| English language version | |||
| Pendant extension cable | 4 m | For TP / MP | |
| 8 m | For TP / MP | ||
| For VS | External battery unit | With 4 m cable | |
| With 8 m cable | |||
| With 12 m cable | |||
| Brake release unit | With 4 m cable | ||
| With 8 m cable | |||
| With 12 m cable | |||
| Air purge unit | Only for protected type robots | ||
| Second arm cover R (with tapped holes) for VS-050 / 060 |
Only for standard type robots(IP40) | ||
| Second arm cover R (with tapped holes) for VS-068 / 087 |
Only for standard type robots(IP40) | ||
| Stopper bolt M8 for J2 mechanical ends for VS-050 / 060 |
For the 2nd axis | ||
| Stopper bolt M5 for J3 mechanical ends for VS-050 / 060 |
For the 3rd axis | ||
| Stopper bolt M10 for J2 / J3 mechanical ends for VS-068 / 087 |
For the 2nd and 3rd axes | ||
| For HM | Flange kit | For 20 kg payload | |
| For 10 kg payload | |||
| For HS | Flange kit | For 5 kg payload | |
| For XR | Valve assembly 4-station manifold valve |
Single shipment (supply part) | |
| Robot mounting shipping | |||
| Hand control cabling kit | - | ||
| Hand control cable | 2m | ||
| Item / Specifications | ||
|---|---|---|
| VM/VP/HM/HS/XR Series Standard cable (for standard type) |
Straight | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| Angle | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| VM/VP/HM/HS/XR Series Splash-proof cable (for dust- & splash-proof type and cleanroom type) |
Straight | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| Angle | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| For VS-050/VS-060/ VS-068/VS-087 |
Straight | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| Angle | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| Type | Item | ||
|---|---|---|---|
| Optional boards for the robot controller RC8 series |
Parallel I/O board (PCI board) |
NPN type I/O | Shipped after mounted on the controller (With license) |
| Shipped separately as a spare part (With license) |
|||
| Shipped separately as a spare part (Without license) |
|||
| License certificate only | |||
| PNP type I/O | Shipped after mounted on the controller (With license) |
||
| Shipped separately as a spare part (With license) |
|||
| Shipped separately as a spare part (Without license) |
|||
| License certificate only | |||
| DeviceNet slave board (PCI Express board) |
Mobile unit | Shipped after mounted on the controller (With license) |
|
| Shipped separately as a spare part (With license) |
|||
| Shipped separately as a spare part (Without license) |
|||
| License certificate only | |||
| CC-Link remote device board (PCI Express board) |
Shipped after mounted on the controller(With license) | ||
| Shipped separately as a spare part(With license) | |||
| Shipped separately as a spare part(Without license) | |||
| License certificate only | |||
| PROFIBUS slave board (PCI Express board) |
Shipped after mounted on the controller(With license) | ||
| Shipped separately as a spare part(With license) | |||
| Shipped separately as a spare part(Without license) | |||
| License certificate only | |||
| EtherNet/IP Adapter board (PCI Express board) |
Shipped after mounted on the controller(With license) | ||
| Shipped separately as a spare part(With license) | |||
| Shipped separately as a spare part(Without license) | |||
| License certificate only | |||
| Electric Gripper Control board (PCI board) |
Shipped after mounted on the controller(With license) | ||
| Shipped separately as a spare part(With license) | |||
| Shipped separately as a spare part(Without license) | |||
| License certificate only | |||
| VGA option for RC 8 | VGA junction cable set*1 | VGA junction cable VGA connector is mounted on the controller before shipping. |
|
| Options for Installation | Stay set for wall-mount | Wall-mount / Floor-mount | |
| Item / Specifications | ||
|---|---|---|
| For HS·HM·VM·VP·XR Series VS-6556·VS-6577 Standard cable (for standard type) |
Straight | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| Angle | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| For HS·HM·VM·VP·XR Series VS-6556·VS-6577 Splash-proof cable (for dust- & splash-proof type and cleanroom type) |
Straight | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| Angle | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| XYC Series Standard cable |
Straight | 4 m |
| 6 m | ||
| For VS-050/VS-060/ VS-068/VS-087 |
Straight | 2 m |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||
| Angle | 2 m | |
| 4 m | ||
| 6 m | ||
| 12 m | ||
| 20 m | ||











If you have not registered
The services on this member site are available only for registered customers.