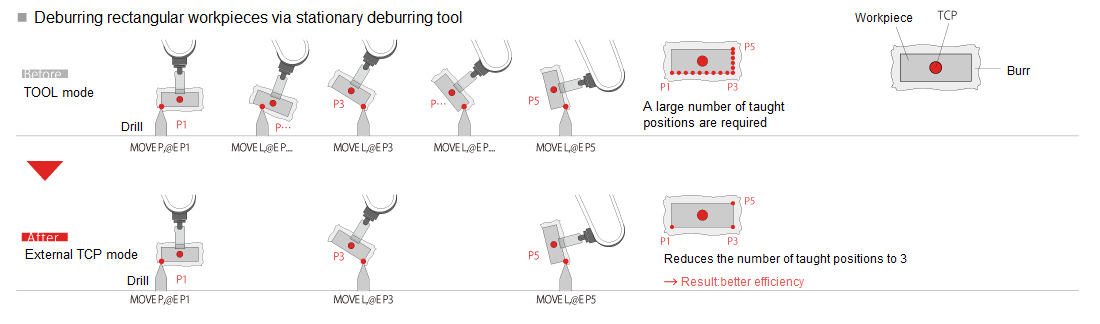
The external TCP function enables rotation about the coordinate origin of a workpiece, making it possible to easily teach the robot with reference to the object.
Main applications|Deburring and sealant coating
Supported Robots|All robot models
Normally, in the case of rotation in the manual mode, the arm and/or the hand rotate without the position coordinates of the tip of the hand changed. The external TCP function enables the arm and/or the hand to rotate about the predetermined coordinate origin of a workpiece. This function can reduce the number of teaching points at the time of continuous path motion (straight or arc) of the robot holding a workpiece, e.g. deburring workpieces using a Leutor that is fixed to the equipment or the application work of a seal on workpieces with a fixed seal gun.





If you have not registered
The services on this member site are available only for registered customers.




































