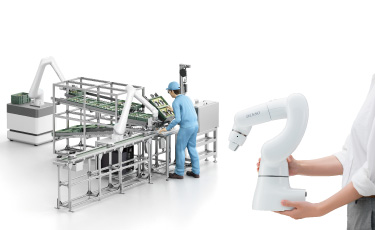

We offer two types of collaborative robots.
COBOTTA PRO is designed not only to collaborate with an operator but also to consistently improve productivity. It operates with a maximum arm reach of 1,463 mm and a maximum TCP speed of 2,500 mm/s.
Anywhere, anytime, hassle-free. COBOTTA is a robot that collaborates with everyone. The main unit weighs only 4 kg, making it easy to install.
Both operate not only in factories, but also in educational and research institutions.
Please select the one that best suits your application.


With a maximum TCP* speed of 2,500 mm/s, the COBOTTA PRO ranks among the industry’s fastest collaborative robots. Its speed is on par with that of a 5-and 6-axis robot during high-speed operation. Acceleration increases by mounting a proprietary, high-rigidity torque sensor on its lightweight, slim arm axes. Pneumatic lines and I/O wiring are routed inside the arm up to the flange to increase usability.
*Tool center point: The center of the point at which the end effector comes into contact with the workpiece.

The COBOTTA PRO maximizes productivity by delivering high-speed operation while maintaining a high level of safety. In addition to enhancing arm design and basic functionality, we developed a new scene function. Moreover, options that increase safety improve productivity by increasing the speed of collaborative operation.

To leverage the advantages of direct teaching, which allows robots to be taught intuitively in a short period of time, we developed new teaching and programming systems specifically for the COBOTTA PRO in an effort to combine basic functionality with ease of use. By taking advantage of the extensive functionality provided by these systems, users can extend the teaching process to include even fine adjustments that would be difficult to make with the conventional approach to direct teaching.

The COBOTTA PRO supports the CRC9, based on the RC9 robot controller. Like the RC9, the CRC9 provides integrated equipment control and an integrated development environment. In addition, it can be combined with Denso Wave’s 3D vision as well as general-purpose AI software to automate manual tasks that would be highly difficult to accommodate using conventional methods.


Collaborative robots do not require safety fences. The unique outer contour has no sharp edges, and consists of curves that prevent hands from getting caught. Sensors are built into the six moving parts for constant monitoring of speed and torque, to guar-antee safety from a function-al aspect (planning to obtain certification from a third-par-ty certification authority).
The main unit weighs approximately 4 kg providing easy portability, and offers a load capacity of 500 g. The integrated controller not only reduces wiring, but also allows consolidated control with other devices. ORiN is supported as standard.

Equipped with a direct teaching function and an intuitive GUI for easy programming. An optional camera can be mounted to enable teaching using the camera.
The integrated controller is open, and COBOTTA's control API is made public, allowing creators to develop their own applications in the environment they choose (OSS version).
| Product name | COBOTTA PRO 900 | COBOTTA PRO 1300 | COBOTTA |
| Number of axes | 6 | 6 + 1 (for an electric gripper)*¹ | |
| Brake | Brakes for all axes | Around 1st axis to Around 5th axis with brake | |
| Overall arm length (1st arm + 2nd arm) |
900mm | 1300mm | 342.5mm |
| Maximum payload | 6kg | 12kg | 0.5kg (0.7 kg within土10 degrees with the wrist angled downward)*² |
| Maximum allowable moment | Around 4th axis:0.8kgm² Around 5th axis:0.45kgm² Around 6th axis:0.1kgm² |
Around 4th axis:1.45kgm² Around 5th axis:0.9gm² Around 6th axis:0.35kgm² |
Around 4th axis:0.0065kgm² Around 5th axis:0.0047kgm² Around 6th axis:0.0012kgm² |
| Position repeatability*³ | ±0.03mm | ±0.04mm | ±0.05mm |
| Degree of protection | IP54 (Dust-& splash-proof type) | COBOTTA unit : IP30 AC adapter and AC cable : IP20 |
|
| Cleanliness classification (ISO14644-1) |
Class 5 (Clean type) | - | |
| Environment Conditions of Installation Site (During operation) |
Ambient temperature : 0 to 50℃ Relative humidity : 20 to 90% (No dew condensation allowed.) Vibration : 4.9 m/s² (0.5 G) or less |
Ambient temperature : 0 to 40℃ Relative humidity : 20 to 80% (No dew condensation allowed.) |
|
| Weight | Approx. 29kg | Approx. 41kg | Approx. 4kg |
| Applicable standards | ISO 10218-1:2011, ISO 13849-1:2015, ISO/TS 15066:2016, IEC 60204-1:2016/A1:2021 EN 61000-6-2:2005, EN 61000-6-4:2007/A1:2011 EN 61000-6-7:2015 |
Standard version:ISO 10218-1:2011, ISO/TS 15066:2016, ISO 13849-1:2015 PL d, Cat. 3 OSS virsion:ISO 13849-1:2015 PL d, Cat. 3 |
|
| Noise (Equivalent continuous A-weighted sound pressure level) |
65dB or less | 55dB or less (Measured with the rated payload and the maximum speed of the factory default setting) |
|
| Pollution degree (IEC 60664-1) |
3 | 2*⁴ | |



If you have not registered
The services on this member site are available only for registered customers.




































