
標準仕様のロボットに、ジャケットを着用させるだけ。洗浄が必要な食品製造工程の自動化を、手軽に低コストで実現します。
対応ロボット|VS068/087
対応コントローラ|RC8A、RC8

ジャケットは、ロボットにかぶせて紐で縛って着用させるだけ。簡単に着脱できるので、毎回取り外してジャケットのみ洗浄することができます。
また、専用プレート(※)で架台に固定することも可能です。ロボットにジャケットを着せたまま、霧吹きや濡れ布巾でお手入れできます。
※専用プレートはお客様手配となります。
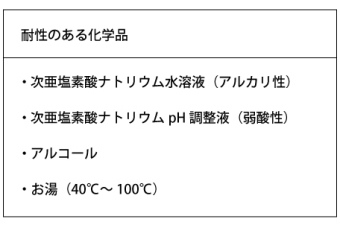
さまざまな化学品に耐性があるため、常に清潔を保ってお使いいただけます。
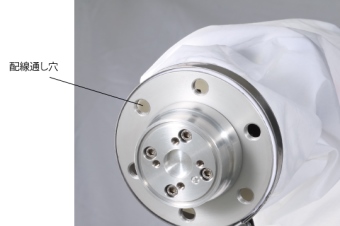
食品用ロボットジャケットの内側から、取付フランジの穴を通してケーブルを配線することができるので、ロボットハンド類のケーブルを収めることができます。
垂直多関節ロボットVSシリーズに食品用ロボットジャケットを着用させ、具材の盛り付けを行います。衛生環境を保ちながら、柔軟物・不定形物のピッキングも可能です。
※ニッタ(株)製開発品ハンド[ SOFTmaticsTM]を使用しています。
| VS068 | VS087 | ||||
| 標準仕様 | ジャケット着用時 | 標準仕様 | ジャケット着用時 | ||
| アーム全長 (第1アーム+第2アーム+先端までの距離) |
760(340+340+80)mm | 830(340+340+150)mm | 955(445+430+80)mm | 1025(445+430+150)mm | |
| 動作角度(※2) | J1 | ±170° | ±120°(※1) | ±170° | ±120°(※1) |
| J2 | +135°~-100° | +90°~-70°(※1) | +135°~-100° | +90°~-70°(※1) | |
| J3 | +153°~-120° | +140°~-20°(※1) | +153°~-136° | +140°~-20°(※1) | |
| J4 | ±270° | ±90°(※1) | ±270° | ±90°(※1) | |
| J5 | ±120° | +110°~-100°(※1) | ±120° | +110°~-100°(※1) | |
| J6 | ±360° | ±240°(※1) | ±360° | ±240°(※1) | |
| 最大可搬質量 | 7kg | 6kg | 7kg | 6kg | |
| 使用可能温度 | 0~40℃ | 0~40℃(※3) | 0~40℃ | 0~40℃(※3) | |
| 最大許容慣性モーメント(イナーシャ) | J4、J5 | 0.45kgm2 | 0.44kgm2 | 0.45kgm2 | 0.44kgm2 |
| 最大許容モーメント | J4、J5 | 16.2Nm | 14.4Nm | 16.2Nm | 14.4Nm |
| J6 | 6.86Nm | 6.69Nm | 6.86Nm | 6.69Nm | |
| 2ndアーム部信号線・ エア配管電磁弁使用可能本数 |
7系統(φ4×6、φ6×1)[電磁弁は1~3の選択式] 1.電磁弁(2ポジション,ダブルソレノイド)×3 2.電磁弁(3ポジション,エキゾーストセンター)×3 3.電磁弁(3ポジション,クローズドセンター)×3 |
信号線:CN21 10本(単線不可、被覆外径φ6.5~8ケーブル1本) エア配管:最大6本(※4) |
7系統(φ4×6、φ6×1)[電磁弁は1~3の選択式] 1.電磁弁(2ポジション,ダブルソレノイド)×3 2.電磁弁(3ポジション,エキゾーストセンター)×3 3.電磁弁(3ポジション,クローズドセンター)×3 |
信号線:CN21 10本(単線不可、被覆外径φ6.5~8ケーブル1本) エア配管:最大6本(※4) |
|
| 設置方向 | 床置き、壁掛け、天吊り | 床置きのみ | 床置き、壁掛け、天吊り | 床置きのみ | |
| ロボット質量 | 49kg | 50kg | 51kg | 52kg | |
| 品名 | タイプ |
|---|---|
| 食品用ロボットジャケットセット(VS068) | VS068用 |
| 食品用ロボットジャケットセット(VS087) | VS087用 |
| 品名 | 用途 |
|---|---|
| ケーブルグランド(φ3~5mm) ※1 | 径φ4~φ6未満のハンド用配線・配管使用時 |
| ケーブルグランド(φ5~8mm) ※2 | 径φ6~φ8のハンド用配線・配管使用時 |
| ケーブルグランド埋栓(φ3~5mm) | ※1 を取り付けながら、配線・配管未使用時 |
| ケーブルグランド埋栓(φ5~8mm) | ※2 を取り付けながら、配線・配管未使用時 |
| 低頭埋栓 | 配線・配管未使用時 |
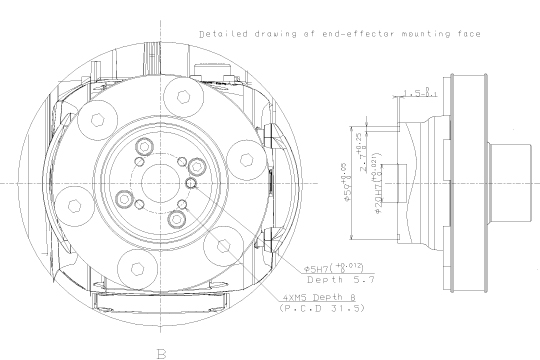
※寸法図はVS068/087共通。配線通し穴6か所すべてに低頭埋栓を取り付けた状態。





















































