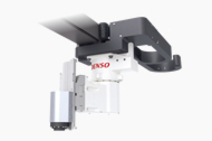
표준 사양의 로봇에 재킷을 착용시키기만 하면 됩니다. 세척이 필요한 식품 제조 공정의 자동화를 손쉽게 저비용으로 실현합니다.
대응 로봇|VS068/087
대응 컨트롤러|RC8A、RC8

재킷은 로봇에 씌워 끈으로 묶어 착용시키기만 하면 됩니다. 간단하게 착탈할 수 있으므로 매번 분리하여 재킷만 세척할 수 있습니다. 또한 전용 플레이트(※)로 가대에 고정하는 것도 가능합니다. 로봇에 재킷을 입힌 채로 분무기나 젖은 천으로 손질할 수 있습니다.
※전용 플레이트는 고객님이 직접 준비해야 합니다.
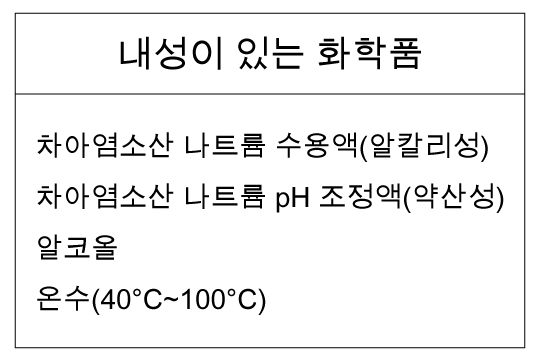
다양한 화학품에 내성이 있으므로 항상 청결을 유지하면서 사용할 수 있습니다.
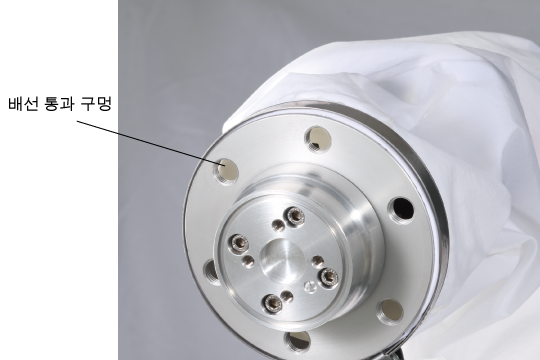
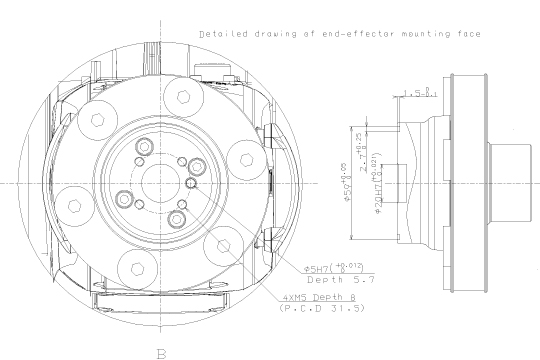
식품용 로봇 재킷 안쪽에서 장착 플랜지의 구멍을 통해 케이블을 배선할 수 있으므로 로봇 핸드류의 케이블을 수납할 수 있습니다.
DENSO Robotics 용 차아 염소산 저항 로봇 재킷 착용.
재료를 골라서 도시락 상자에 놓습니다.
* Nitta Corporation에서 제조 한 식품 그리퍼 "SOFTmaticsTM" (개발 중)를 채택합니다.
| VS068 | VS087 | ||||
| 표준 사양 | 재킷 착용 시 | 표준 사양 | 재킷 착용 시 | ||
|
암 전장 (제1 암+제2 암+선단까지의 거리) |
760(340+340+80)mm | 830(340+340+150)mm | 955(445+430+80)mm | 1025(445+430+150)mm | |
| 동작 각도(※2) | J1 | ±170° | ±120°(※1) | ±170° | ±120°(※1) |
| J2 | +135°~-100° | +90°~-70°(※1) | +135°~-100° | +90°~-70°(※1) | |
| J3 | +153°~-120° | +140°~-20°(※1) | +153°~-136° | +140°~-20°(※1) | |
| J4 | ±270° | ±90°(※1) | ±270° | ±90°(※1) | |
| J5 | ±120° | +110°~-100°(※1) | ±120° | +110°~-100°(※1) | |
| J6 | ±360° | ±240°(※1) | ±360° | ±240°(※1) | |
| 최대 가반 질량 | 7kg | 6kg | 7kg | 6kg | |
| 사용 가능 온도 | 0~40℃ | 0~40℃(※3) | 0~40℃ | 0~40℃(※3) | |
|
최대 허용 관성 모멘트 (이너셔) |
J4、J5 | 0.45kgm2 | 0.44kgm2 | 0.45kgm2 | 0.44kgm2 |
| 최대 허용 모멘트 | J4、J5 | 16.2Nm | 14.4Nm | 16.2Nm | 14.4Nm |
| J6 | 6.86Nm | 6.69Nm | 6.86Nm | 6.69Nm | |
|
신호선ㆍ 에어 배관 전자 밸브 |
에어 배관 | 7계통(φ4×6, φ6×1) |
로봇 본체: 7계통(φ4×6, φ6×1) 재킷 플랜지 측 취출구: 최대 6계통(φ4~φ8) |
7계통(φ4×6, φ6×1) |
로봇 본체: 7계통(φ4×6, φ6×1) 재킷 플랜지 측 취출구: 최대 6계통(φ4~φ8) |
| 설치 방향 | 바닥 거치, 벽걸이, 천장에 달기 | 바닥 거치만 | 바닥 거치, 벽걸이, 천장에 달기 | 바닥 거치만 | |
| 로봇 질량 | 49kg | 50kg | 51kg | 52kg | |
| 품명 | 타입 |
|---|---|
| 식품용 로봇 재킷 세트(VS068) | VS068용 |
| 식품용 로봇 재킷 세트(VS087) | VS087용 |
| 품명 | 용도 |
|---|---|
| 케이블 그랜드(φ3~5mm)※1 | 직경 φ4~φ6 미만의 핸드용 배선ㆍ배관 사용 시 |
| 케이블 그랜드(φ5~8mm)※2 | 직경 φ6~φ8의 핸드용 배선ㆍ배관 사용 시 |
| 케이블 그랜드 플러그(φ3~5mm) | ※1을 장착하면서 배선ㆍ배관 미사용 시 |
| 케이블 그랜드 플러그(φ5~8mm) | ※2을 장착하면서 배선ㆍ배관 미사용 시 |
| 낮은 머리 플러그 | 배선ㆍ배관 미사용 시 |
※치수도는 VS068/087 공통. 배선 통과 구멍 6곳 모두에 낮은 머리 플러그를 장착한 상태.
덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)