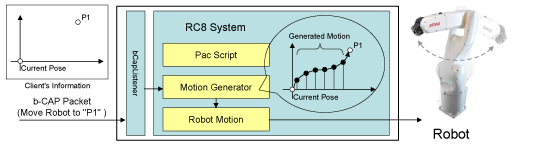
PCやPLCなどの各種機器からロボットへ直接動作コマンドのパケットを送り、ロボットを制御可能です。
対応ロボット|RC8A、RC9、CRC9対応ロボット
LinuxやMac、ORiN2 SDKがインストールされていないWindowsなどのデバイスからでもb-CAPパケットを送信することでロボットを制御することが可能です。
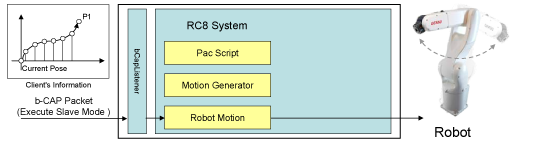
短い時間間隔で位置・姿勢データを送信することでロボットを操作する機能です。
クライアントがロボットの姿勢を逐次指定することでロボットのリアルタイム制御を行います。この機能を用いることで、クライアントがロボットの軌跡を自由に操作することができます。