PC나 PLC 등 각종 기기로부터 로봇으로 직접 동작 커맨드 패킷을 보내 로봇을 제어할 수 있습니다.
Linux나 Mac, ORiN2 SDK가 인스톨되어 있지 않은 Windows 등의 디바이스에서도 b-CAP 패킷을 송신하여 로봇을 제어할 수 있습니다.
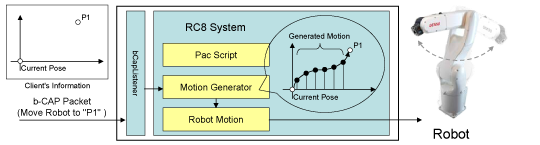
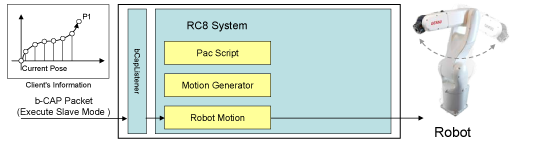
짧은 시간 간격으로 위치, 자세 데이터를 송신하여 로봇을 조작하는 기능입니다.
클라이언트가 로봇의 자세를 순차 지정하여 로봇의 실시간 제어를 합니다. 이 기능을 사용함으로써 클라이언트가 로봇의 궤적을 자유롭게 조작할 수 있습니다.





덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)