可直接从PC或PLC等各种机器向机器人发送动作指令包,从而控制机器人。
即使是使用Linux、Mac,或未安装OriN2 SDK的Windows等的设备,也能通过发送b-CAP包来控制机器人。
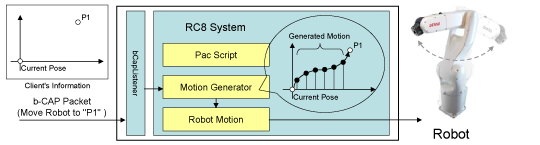
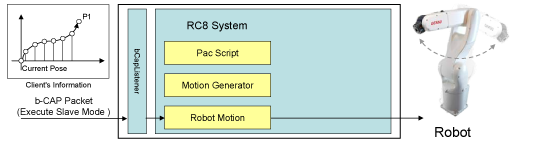
通过在短时间间隔内发送位置/姿势数据来操作机器人的功能。
客户通过依次指定机器人的姿势来进行机器人的实时控制。使用该功能时,客户能够自由地操作机器人的轨迹。
为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)