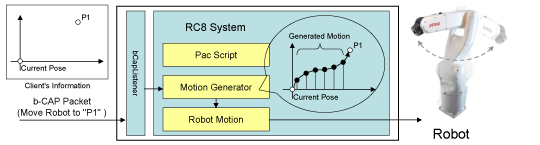
By directly sending packets of motion commands to the robot from a PC, PLC or other device, the robot can be controlled.
Even from a Windows-based PC or other device where Linux, Mac or ORiN2 SDK is not installed, the robot can be controlled by sending b-CAP packets.
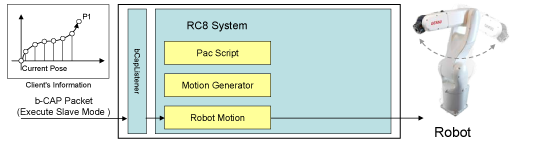
This function is to control the robot by sending position and posture data at short time intervals. The client controls the robot in real time by serially designating its posture. This function enables the client to freely determine the robot’s path.





If you have not registered
The services on this member site are available only for registered customers.




































