製品
活用シーン
導入事例
ダウンロード
サポート
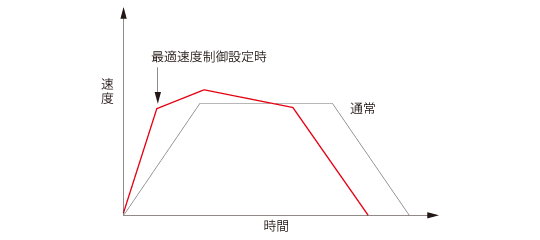
ロボットの先端負荷や姿勢に応じた動作速度・加速度の最適化でタクトタイムを短縮します。対応ロボット|RC8A、RC9、CRC9対応ロボット
ロボットアームの先端に取り付ける、ツールやワークの質量と重心位置により、最適な速度や加速度は異なります。このため、ロボットの先端負荷や姿勢に応じて、ツールやワークの質量と重心位置および、モードを設定します。
パスワードを忘れた方はこちら
まだ会員に登録されていない方
本会員専用サイトにおけるサービスは、会員登録していただいた上でのみご利用いただけます。
新規会員登録