产品
运用领域
导入案例
下载
支持
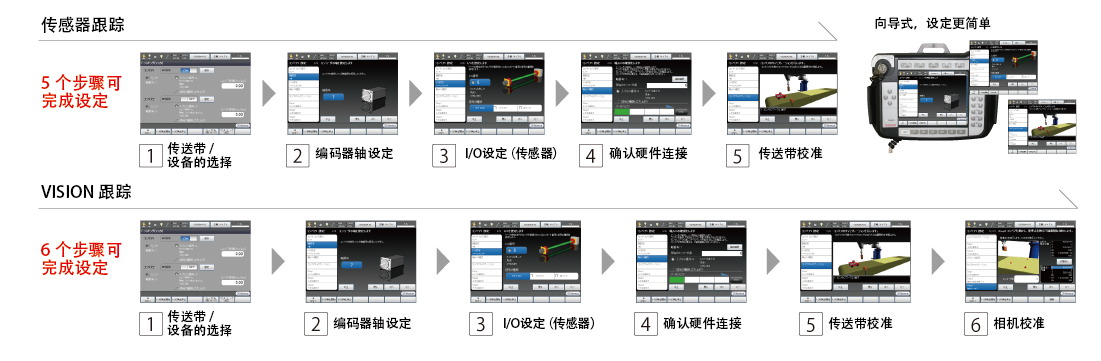
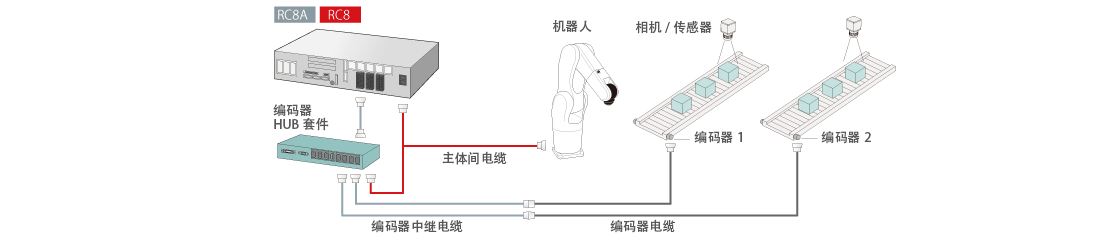
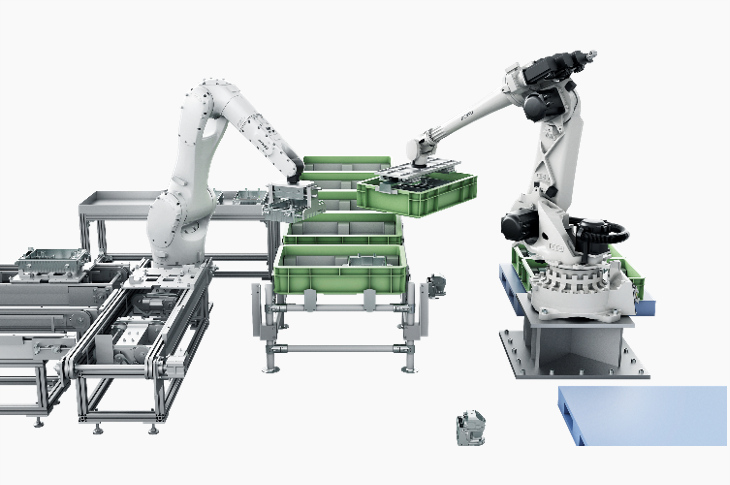
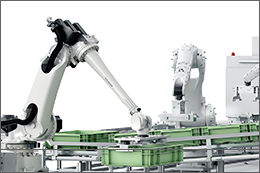
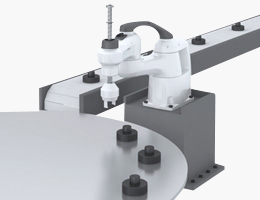
机器人会追踪工件,在不停止输送机的状态下也能进行搬送/排列作业。对应机器人|支持RC8A、RC8所有机型支持版本|Ver.1.6.*
为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)
忘记密码的用户
尚未注册为会员的客户
本会员专用网站中提供的服务仅限已完成会员注册的客户使用。
首次注册会员