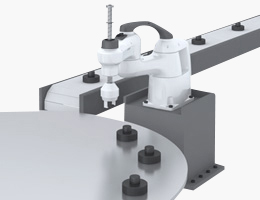
로봇이 워크에 따라 컨베이어를 중단하지 않고 반송, 정열 작업이 가능합니다. 컨베이어 트래킹에는 아래의 2종류가 있습니다.
센서 트래킹
임의 간격으로 일직선으로 나란히 운반되어 오는 워크를 픽업할 때 사용합니다. 광전센서 앞을 워크가 횡단했을 때 신호를 트리거로 하는 방식입니다. 광전센서 앞을 워크가 횡단했을 때 워크 위치를 사전에 등록하여 트리거가 들어올 때마다 그 워크가 어디로 흘러들어올지를 순차적으로 계산해서 로봇이 따르도록 합니다.
비전 트래킹
임의의 위치, 자세로 놓여서 운반되어 오는 워크를 픽업할 때 사용합니다.
비전 센서가 화상인식으로 워크를 검출했을 때 신호를 트리거로 하는 방식입니다.
트리거가 들어올 때마다 화상인식으로 검출한 워크의 위치, 자세를 등록하여 그 워크가 어디로 흘러들어올지를 순차적으로 계산해서 로봇이 따르도록 합니다.
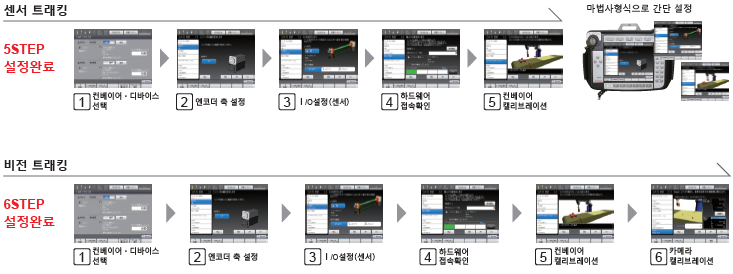
설정방법
번거로운 컨베이어 트래킹 조절을 위저드 형식의 GUI로 간단하게 조절할 수 있습니다.
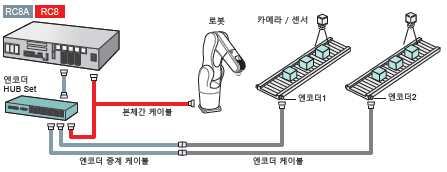
システム構成