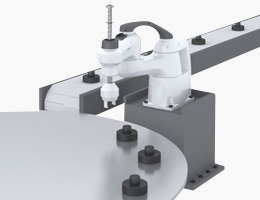
Since a robot can track workpieces, workpieces can be conveyed and aligned without stopping the conveyer.
Applicable robots|All RC8A/RC8-compliant models
Applicable version|Ver.1.6.*
Since a robot can track workpieces, workpieces can be conveyed and aligned without stopping the conveyer.
There are two types of conveyer tracking.
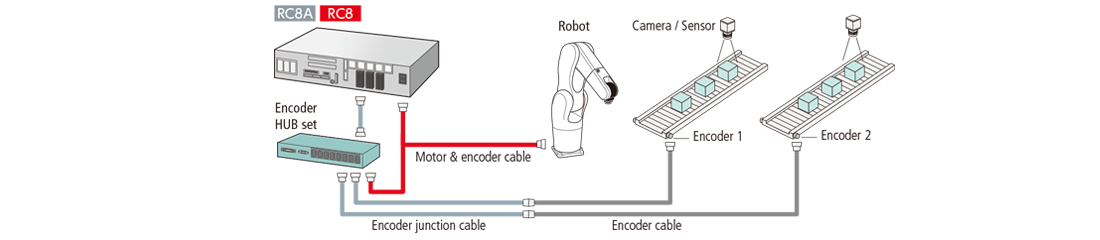
Sensor tracking is used to pick up workpieces that move on a line in a straight line at arbitrary intervals. When a workpiece passes a photoelectric sensor, the signal is triggered. The position of the workpiece is programmed beforehand, and every time a workpiece passes a sensor to trigger the signal, the robot sequentially calculates where the workpiece will move to and follows it.
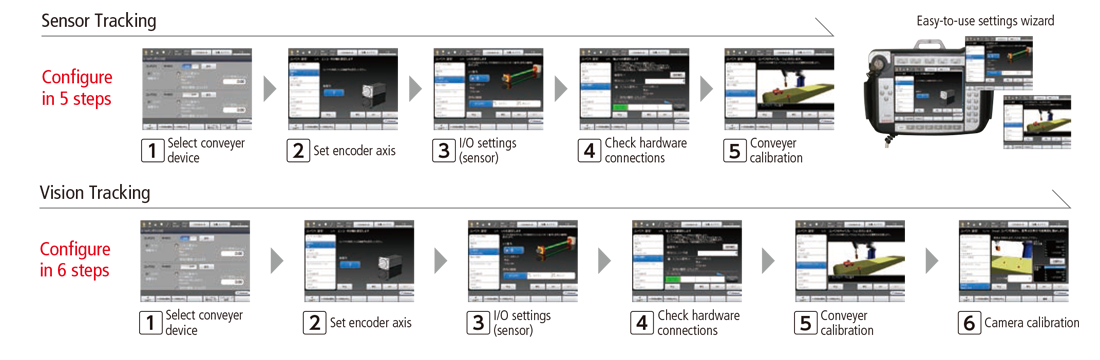
Troublesome conveyer tracking adjustment can be easily carried out with the wizard-type GUI.





If you have not registered
The services on this member site are available only for registered customers.




































