力センサを使って、ロボットの手先の押し付け力を一定に制御することができます。 組付けや研磨などに本機能を使用すると、安定した作業を行うことができます。
対応ロボット|RC8A、CRC9対応の垂直多関節ロボット
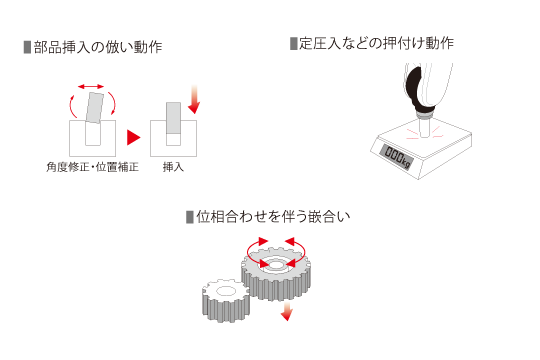
力センサからのフィードバック制御とデンソー独自の力制御アルゴリズムにより、繊細な倣い・嵌合い・押付け動作が可能です。
専用GUIによって力センサからのフィードバック値のモニタリングや、力制御の設定調整が可能となり立上げ工数の低減に貢献できます。

※本機能はロボットが人に衝突・接触した際に、その力を低減する安全機能ではありません。
※力センサは下記のいずれかのメーカのものが使用可能です。
| メーカ | 対応するロボットコントローラの ソフトウェアバージョン |
|---|---|
| 株式会社ワコーテック | Ver.2.2.*以上 |
| ATI Industrial Automation | Ver.2.11.0以上 |
| 新東工業株式会社 | Ver.2.11.0以上 |